

Schrittmotoren12 Produkte
Sortieren nach:
| Bild | Teilenummer | Hersteller | Beschreibung | Verfügbarkeit | Aktionen | |
|---|---|---|---|---|---|---|
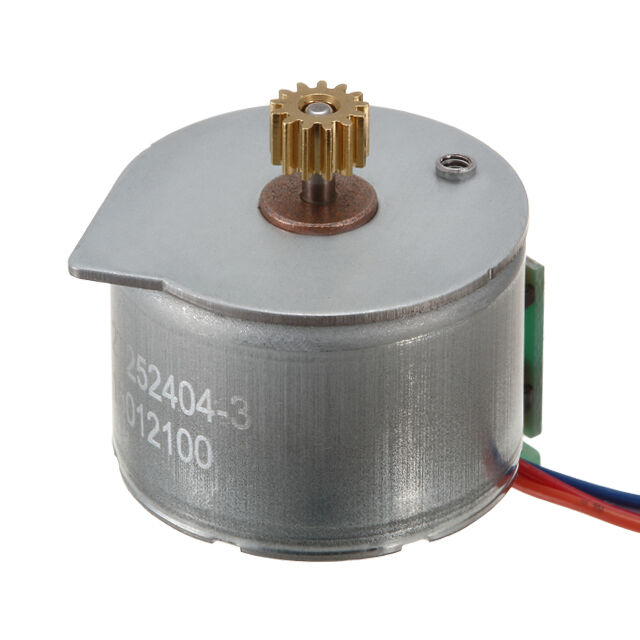 PDF | 2T252404-3 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T151381 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T1513102-1 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T254265A | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
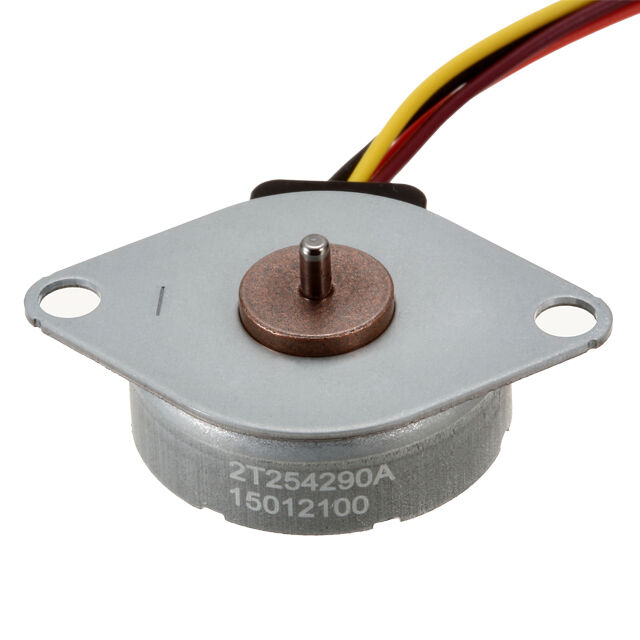 PDF | 2T254290A | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T254265 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
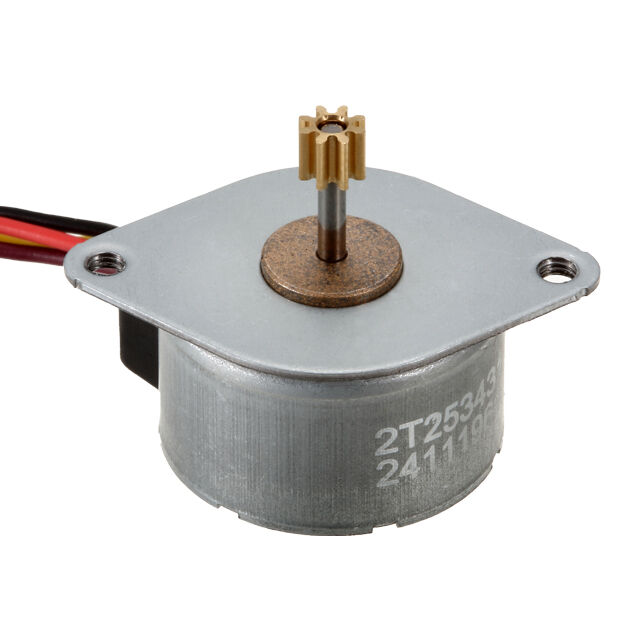 PDF | 2T253431 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 24V/34V | Auf Lager | MOQ: 1 Hover für Angebot | |
PDF | 2T1513134 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T253442 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 24V/34V | Auf Lager | MOQ: 1 Hover für Angebot | |
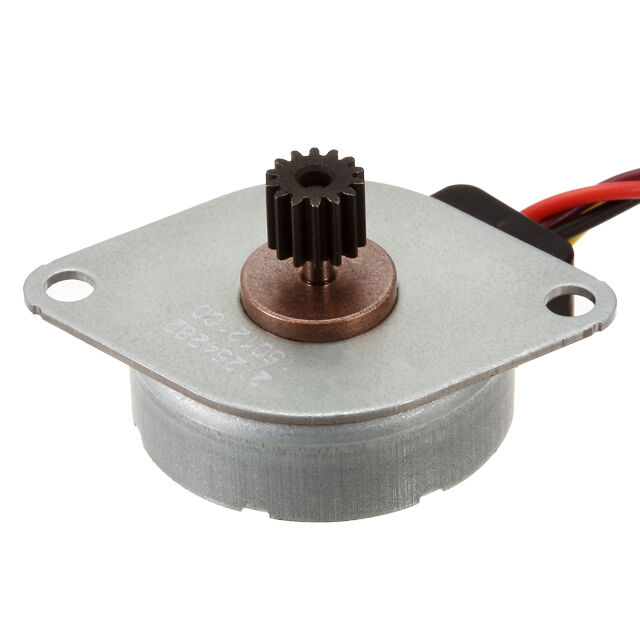
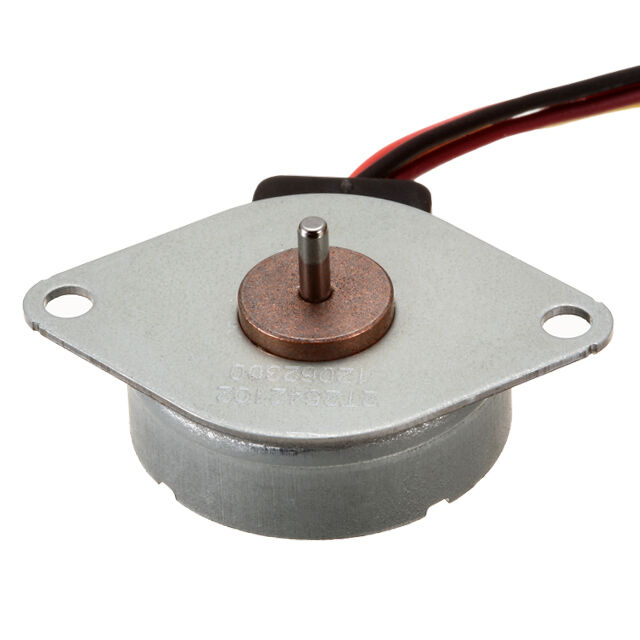 PDF | 2T2542102 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
PDF | 2T151305 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot | |
 PDF | 2T254282 | Excel Cell Electronic Co., Ltd. | STEPPER MOTOR PM BIPOLAR 12V | Auf Lager | MOQ: 1 Hover für Angebot |
Schrittmotoren sind Gleichspannungs-Antriebe, die sich in diskreten Schritten bewegen. Mehrere Spulensätze, die in Gruppen organisiert sind, sogenannte „Phasen“, bestimmen die Rotorposition. Das sukzessive Erregen jeder Phase bewirkt, dass sich der Rotor Schritt für Schritt dreht. Durch vom Computer oder Mikrocontroller gesteuertes Schrittmuster lassen sich präzise Positionierung und/oder Geschwindigkeitsregelung realisieren. Schrittmotoren werden nach Drehmoment, Schritten pro Umdrehung, Schrittwinkel, NEMA-Gehäusegröße, Spulenwiderstand, Polung und Wellenmerkmalen ausgewählt.