Selecionando o melhor protocolo automotivo CAN Bus ou LIN Bus
Muitas vezes você enfrenta a escolha entre o protocolo CAN Bus e o LIN Bus ao projetar sistemas automotivos. CAN Bus domina cenário

Muitas vezes você enfrenta a escolha entre o protocolo CAN Bus e o LIN Bus ao projetar sistemas automotivos. O CAN Bus domina cenários que exigem alta velocidade e confiabilidade, especialmente emVeículos elétricosE componentes eletrônicos complexos. O LIN Bus adapta-se a funções automotivas mais simples e sensíveis ao custo onde a velocidade é menos crítica.
Os principais fatores decisórios incluem:
- Velocidade e taxa dos dados
- Complexidade
- Fiabilidade
- Custo
Você pode usar o guia de comparação e decisão do can bus vs lin bus para combinar os recursos do protocolo às suas necessidades automotivas.
Principais Takeaways
- Escolha o ônibus CAN paraComunicação confiável e de alta velocidadeEm sistemas automotivos complexos. Ele se destaca em aplicações críticas de segurança, como controle do motor e assistência avançada ao motorista.
- Opte pelo LIN Bus ao trabalhar emProjetos sensíveis aos custosQue exigem comunicação simples. É ideal para funções básicas como controlar janelas e luzes.
- Considere o número de dispositivos e a velocidade necessária ao selecionar um protocolo. CAN suporta muitos ECUs, enquanto LIN é adequado para menos tarefas, menos exigentes.
- Lembre-se que tanto o CAN quanto o LIN podem trabalhar juntos em um veículo. Use CAN para tarefas críticas e LIN para conexões mais simples e de baixo custo.
- Avalie cuidadosamente as necessidades do seu sistema. A correspondência do protocolo certo aos seus componentes automotivos garante uma operação eficiente e segura.
CAN Bus vs LIN Bus

Tabela Comparação
Quando você compara o can bus vs lin bus, você vê diferenças claras em como cada protocolo suportaComponentes eletrônicos automotivosECircuitos integrados-A.A tabela abaixo dá-lhe uma visão geral rápida das suas principais características-A. Isso ajuda você a decidir qual protocolo atende às suas necessidades de comunicação entre dispositivos em seu veículo.
| Característica | PODE ônibus | Autocarro LIN |
|---|---|---|
| Velocidade | Taxas de dados elevadas para aplicações sensíveis ao desempenho | Menor velocidade adequada para tarefas básicas |
| Custo | Mais caro devido à complexidade | Custo-benefício com design de fio único |
| Complexidade | Mais complexo com design multi-mestre | Simples com único mestre |
| Fiabilidade | Alta confiabilidade com gerenciamento avançado do erro | Apenas detecção do erro básico |
| Aplicações típicas | Grandes redes com muitos ECUs, sistemas críticos de segurança | Sistemas pequenos e sensíveis ao custo, como recursos internos |
Você pode usar o barramento quando seu sistema automotivo precisa de comunicação rápida e confiável entre muitas unidades de controle eletrônico (ECUs). Isso é importante para circuitos integrados que lidam com recursos de segurança ou gerenciamento do motor. O can bus suporta transferência de dados em alta velocidade, o que é essencial para a comunicação em tempo real em sistemas avançados de assistência ao motorista (ADAS) e condução autônoma. Você geralmente encontra barramento no controle do powertrain, controle do chassi e sistemas de infotainment. Esses sistemas dependem de protocolos de comunicação complexos para manter todos os componentes eletrônicos trabalhando juntos.
Por outro lado, o lin bus funciona melhor para aplicações simples e sensíveis ao custo. Você usa o lin bus para tarefas como controlar fechaduras de portas, ajustes de assento e iluminação. O design de fio único do lin bus reduz a complexidade e o custo da fiação. Isso o torna ideal para conectarSensoresE atuadores que não precisam de comunicação de alta velocidade. O barramento Lin geralmente se conecta a circuitos integrados que gerenciam funções básicas, como controles de janela ou iluminação interior.
Dica:
Quando você escolher entre o ônibus pode vs o ônibus lin, pense no número de dispositivos, na velocidade que você precisa e em quão crítica é a comunicação para a segurança.
Casos De Uso Típicos Em Veículos Modernos
Você pode ver como o bus vs lin bus se encaixa em diferentes sistemas automotivos observando seus casos de uso mais comuns. A tabela abaixo mostra onde cada protocolo se destaca.
| Tipo do ônibus | Usar Caso | Descrição |
|---|---|---|
| LIN | Gerenciamento interno do dispositivo | Usado para gerenciar funcionalidades como fechaduras, ajustes de assento e janelas elétricas devido à sua eficiência de largura de banda moderada. |
| LIN | Gestão Iluminação | Controla a iluminação interior e exterior, permitindo a modulação da intensidade da luz e ativação seletiva. |
| LIN | Sensores e Diagnóstico | Conecta sensores para coleta de dados sobre temperatura do motor, nível de combustível e pressão dos pneus, auxiliando no diagnóstico a bordo. |
| LIN | Integração com outras redes | Trabalha com CAN para tarefas como gerenciar arruelas de janelas, coordenando operações para eficiência. |
| PODE | Controle Powertrain | Coordena o motor, a transmissão e os elementos relacionados para um desempenho ideal. |
| PODE | Controle Chassis | Integra sistemas como controle de tração, ABS e airbags para segurança. |
| PODE | Sistemas Infotainment | Gere dispositivos multimídia, navegação e entretenimento dentro do veículo. |
| PODE | Ferramentas Diagnóstico | Permite o diagnóstico em tempo real de problemas e desempenho do veículo. |
| PODE | Telemática | Facilita a comunicação veículo-infraestrutura (V2I) e veículo-veículo (V2V). |
| PODE | Gestão Frota | Permite o controlo e monitorização centralizados de uma frota de veículos. |
Você percebe que o can bus suporta aplicações mais complexas e críticas para a segurança. Estes envolvem frequentemente circuitos integrados múltiplos e exigem protocolos de comunicação robustos. O ônibus Lin, no entanto, lida com tarefas mais simples e ajuda a reduzir o custo e o peso da fiação no veículo.
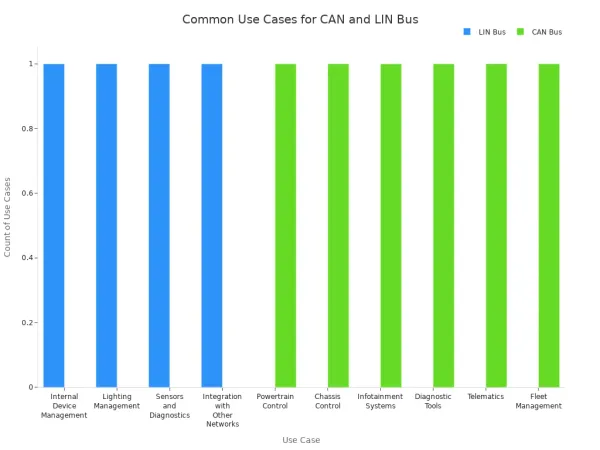
Este gráfico mostra que o can bus abrange uma ampla gama de casos de usoEm sistemas automotivos. Você vê mais aplicativos para o barramento de lata em áreas que exigem comunicação confiável e de alta velocidade. O ônibus Lin continua popular para funções básicas onde o custo e a simplicidade são mais importantes.
Avanços e tendências recentes
Você também deve considerar como os avanços recentes afetam sua escolha entre o ônibus can vs o ônibus lin. A ascensão de ADAS e veículos autônomos aumenta a necessidade de avançadoProtocolos comunicação-A. O Can Bus agora desempenha um papel maior na conexão de componentes eletrônicos e circuitos integrados que suportam esses recursos. O crescimento da Internet das Coisas (IoT) e da computação em nuvem também impulsiona novos usos para o barramento, como telemática e gerenciamento de frota.
O Lin bus continua a oferecer uma solução econômica para interações simples com dispositivos-A. Seu design de fio único reduz o tamanho e o peso do sistema, o que é importante para aplicações automotivas com restrição de espaço. Você se beneficia de uma instalação mais rápida e custos mais baixos quando usa o lin bus para necessidades básicas de comunicação.
Nota:
Ambos podem ônibus e ônibus lin muitas vezes trabalham juntos em veículos modernos. Você pode usar o can bus para comunicação de alta velocidade e segurança crítica e o lin bus para conexões simples e de baixo custo entre sensores e atuadores.
Quando você compara o can bus vs lin bus, sempre combine o protocolo com as necessidades de seus componentes eletrônicos e circuitos integrados. Isso garante que seu sistema automotivo funcione com eficiência e segurança.
CAN Bus Overview
CAN Bus Características
Você usa o CAN Bus, também conhecido como controller area network, quando precisa de comunicação confiável entre muitas ECUs em seu sistema automotivo. CAN Bus segue rigorosoNormas ISOPara garantir que seus componentes eletrônicos e circuitos integrados funcionem juntos sem problemas. Aqui está uma tabela mostrando as principais características técnicas definidas pelas normas ISO mais recentes:
| Norma ISO | Descrição |
|---|---|
| ISO 11898-5:2007 | Suporta taxas de transmissão de até 1 Mbit/s, inclui recursos de baixa potência para veículos rodoviários. |
| ISO 11898-6:2013 | Adiciona ativação seletiva, permitindo ativar ECUs específicas usando quadros CAN configuráveis. |
| ISO 16845 1:2016 | Fornece métodos para verificar se sua implementação CAN atende aos padrões. |
| ISO 16845 2:2018 | Define os requisitos para testar as funções seletivas de ativação do transceptor CAN. |
Você se beneficia de recursos como robustez contra distúrbios elétricos e interferência eletromagnética. O CAN Bus usa tratamento avançado de erros, para que seus ECUs possam retransmitir mensagens defeituosas e manter os dados seguros. A arbitragem permite que seu sistema priorize dados importantes, o que ajuda a evitar colisões e mantém a comunicação rápida.
Dica: O CAN Bus suporta redes automotivas complexas, tornando-o ideal para conectar circuitos integrados que controlam a segurança e o desempenho.
PODE Ônibus Pontos Fortes
CAN Bus dá-lheIntegridade forte dos dadosRobustez da rede. Você pode confiar em sua detecção de erros, que usa mecanismos como CRC para manter seus dados precisos. O confinamento por falhas ajuda sua rede a permanecer saudável isolando ECUs problemáticas. A sinalização diferencial significa que a rede da área do controlador resiste ao ruído elétrico, para que seu sistema automotivo funcione bem mesmo em ambientes adversos.
| Pontos Fortes | Descrição |
|---|---|
| Detecção Erro Capacidades | Mecanismos sofisticados garantem alta integridade dos dados e comunicações confiáveis. |
| Confinamento Falha | Isola ECUs defeituosas para manter a integridade da rede. |
| Resistência à interferência | A sinalização diferencial protege contra o ruído elétrico. |
Você vê esses pontos fortes em ação quando os componentes eletrônicos e circuitos integrados do seu veículo precisam compartilhar informações com rapidez e segurança.
CAN Bus Aplicações
Você encontra o CAN Bus no coração de muitos sistemas automotivos. Ele conecta ECUs e permite que suas unidades de controle troquem dados eficientemente. O CAN Bus éMais barato que EthernetE mais confiável que o LIN para tarefas complexas. Você usa o CAN Bus para controle do powertrain, controle do chassi, infotainment e diagnósticos. Também suporta telemática e gestão de frotas, ajudando o seu veículo a comunicar com outros veículos e infraestruturas.
- Controle do powertrain: coordena o motor e a transmissão para melhor desempenho.
- Controle do chassi: Integra controle de tração, ABS e airbags para segurança.
- Infotainment: Gere sistemas multimídia e navegação.
- Diagnóstico: Permite monitoramento e solução de problemas em tempo real.
- Telemática: Suporta comunicação veículo-veículo e veículo-infraestrutura.
À medida que a tecnologia automotiva avança, você precisa entender como protocolos como o CAN Bus conectamComponentes eletrônicos e circuitos integrados-A. Esse conhecimento ajuda você a construir veículos mais seguros e inteligentes.
Resumo do LIN Bus
Características do ônibus LIN
Você usa o ônibus lin, ouRede interconectada local, Quando você precisa de uma maneira simples e econômica de conectar componentes eletrônicos em seu sistema automotivo. Este protocolo funciona bem para comunicação básica entre ECUs e circuitos integrados que não requerem alta velocidade. O lin bus usa um único fio, o que reduz a complexidade da fiação e ajuda você a economizar nos custos de instalação.
Aqui está uma tabela mostrando os principais recursos da rede de interconexão local, com base nas especificações mais recentes:
| Característica | Descrição |
|---|---|
| Baixo Custo | Opção acessível devido aos baixos requisitos de hardware e facilidade de uso. |
| Baixa velocidade | Opera de 1,2 a 20,0 kbps, adequado para aplicações com baixa necessidade de dados. |
| Arquitetura Mestre-Escravo | A comunicação é iniciada por um nó mestre gerenciando troca de dados com escravos. |
| Comunicação fio único | Reduz a complexidade da fiação usando uma única linha para transmissão de dados. |
As principais características do protocolo incluem:
- Único mestre, até 16 escravos (nenhuma arbitragem do ônibus).
- Comunicações de fio único de até 19,2 kbit/s a 40 metros de comprimento.
- Latência garantida vezes.
- Comprimento variável do quadro de dados (2, 4 e 8 bytes).
- Configuração flexível.
- Data checksum e detecção erro.
Pontos fortes do ônibus LIN
Você se beneficia do ônibus lin porque ofereceCusto-eficácia e simplicidade-A. A rede de interconexão local permite conectar ECUs e circuitos integrados com hardware mínimo. Você só precisa de um único fio e algunsMicrocontroladores-A. Esta configuração reduz o número de componentes e torna o protocolo fácil de implementar.
- Custo-benefício: o lin bus reduz a complexidade da fiação e reduz o número de peças.
- Simplicidade: Você pode configurar a rede de interconexão local rapidamente, o que economiza tempo de desenvolvimento.
- Flexibilidade: O protocolo suporta diferentes comprimentos de dados e tempos de resposta.
- Detecção de erros: As somas de verificação integradas ajudam a manter uma comunicação confiável entre ECUs.
Aplicações LIN Bus
Você costuma usar o lin bus em sistemas automotivos para tarefas que não precisam de transferência de dados em alta velocidade. A rede local da interconexão conecta ECUs e circuitos integrados nas áreas como:
- Poder fechaduras porta
- Janelas elétricas
- Assentos do poder
- Espelhos do poder
- Limpa pára-brisas
- Aquecedores assento
- Controles de aquecimento e ar condicionado
- Luzes interiores
- Controlos climáticos
- Comandos do volante (cruise control, limpador, rádio)
- Teto solar
- Mala
Você vê o barramento lin nessas aplicações porque mantém os custos baixos e a fiação simples. O protocolo ajuda você a gerenciar funções básicas em seu veículo, tornando-o uma escolha prática para muitos componentes eletrônicos automotivos.
Principais diferenças

Velocidade e Taxa Dados
Você precisa considerar a velocidade ao escolher um protocolo para o seu sistema automotivo. CAN suporta comunicação de alta velocidade entre ECUs, o que é importante para controle e segurança em tempo real.CAN pode chegar a até 1 Mbps no modo de alta velocidadeAté 15 Mbps com taxa de dados flexível. Isso permite que seus componentes eletrônicos e circuitos integrados troquem dados rapidamente. O LIN, por outro lado, opera a velocidades muito mais baixas, normalmente abaixo de 20 kbps. Isso torna o LIN adequado para tarefas simples onde a transferência rápida de dados não é necessária, como controlar luzes internas ou ajustes do assento.
| Tipo do ônibus | Taxa máxima dados | Taxa De Dados Típica |
|---|---|---|
| PODE (baixa velocidade) | 125 kbps | N/A |
| CAN (alta velocidade) | 1 Mbps | N/A |
| CAN (Taxa De Dados Flexível) | 15 Mbps | N/A |
| LIN | N/A | <20 kbps |
Custo e complexidade
Custo e complexidade desempenham um papel importante na seleção do protocolo. CAN requer hardware e software mais complexos em suas ECUs. Isso aumenta o custo, mas também traz recursos avançados para comunicação e desempenho. O LIN oferece uma solução mais simples e barata. Você só precisa de um único fio para LIN, o que reduz os custos de instalação. O LIN é fácil de implementar em componentes eletrônicos e circuitos integrados que não precisam de alto desempenho.
| Característica | PODE ônibus | Autocarro LIN |
|---|---|---|
| Custo | Maior devido ao hardware complexo | Menor devido ao protocolo mais simples |
| Complexidade | Mais complexo | Simples, mais fácil de implementar |
| Fiação | Requer vários fios | Requer apenas um fio |
| Aplicação Adequação | Adequado para aplicações de alto desempenho | Ideal para sistemas distribuídos de baixo custo |
LIN simplifica a fiação e reduz o tamanho e o peso do sistema, Fazendo lhe uma boa escolha para projetos automotivos espaço-limitados.
Confiabilidade e verificação do erro
A confiabilidade é fundamental para ECUs automotivas, especialmente em sistemas de segurança. CAN usa verificação avançada de erros, como CRC, monitoramento de bits e verificações de quadros. Se ocorrer um erro, CAN pode retransmitir mensagens e até mesmo isolar nós defeituosos. Isso torna a CAN muito confiável para componentes eletrônicos que controlam freios ou motores. O LIN usa detecção básica de erros como checksums e paridade do cabeçalho. Não suporta retransmissão automática ou tratamento avançado de falhas. O LIN funciona bem para comunicação não crítica, mas não corresponde à confiabilidade da CAN para funções automotivas importantes.
| Característica | PODE ônibus | Autocarro LIN |
|---|---|---|
| Métodos Detecção Erro | Múltiplos mecanismos (CRC, monitoramento de bits, cheques) | Checksums simples, paridade do cabeçalho |
| Sinalização Erro | Quadros de erro automáticos, notificação em toda a rede | Limitada, afeta apenas a comunicação mestre-escravo |
| Manipulação retransmissão | Retransmissão automática | Sem suporte a retransmissão |
| Confinamento Falha | Pode isolar nós defeituosos | Nenhuma falha avançada confinamento |
| Confiabilidade geral | Alto, adequado para sistemas críticos de segurança | Moderado, para eletrônicos não críticos |
Aplicação Fit
Você deve combinar o protocolo com as necessidades do seu sistema automotivo. CAN se encaixa melhor em aplicações que precisam de comunicação rápida e confiável entre muitos ECUs, como powertrain, chassi e infotainment. Esses sistemas dependem de circuitos integrados complexos e exigem alto desempenho.O LIN é ideal para tarefas simples e sensíveis ao custo, Como controlar janelas, espelhos ou luzes interiores. O LIN conecta sensores e interruptores na eletrônica do corpo, onde a velocidade e a confiabilidade são menos críticas.
| Tipo do ônibus | Aplicações |
|---|---|
| PODE | Veículos passageiros, caminhões, ônibus, equipamento agrícola, aviação, automatização industrial, robótica |
| LIN | Poder fechaduras porta, janelas do poder, assentos do poder, Limpa pára-brisas, controles climáticos, luzes interiores, controles no volante |
Ao projetar sua rede automotiva, sempre considere como cada protocolo suporta as necessidades de comunicação de suas ECUs e circuitos integrados.
Guia Decisão
Quando escolher a CAN
Você deve selecionar CAN quando seu sistema automotivo exigir comunicação rápida e confiável entre muitos componentes eletrônicos e circuitos integrados. O CAN suporta redes de alto desempenho, tornando-o ideal para sistemas críticos de segurança, como controle do motor, frenagem e assistência avançada ao motorista. Você pode maximizar o desempenho usando CAN em ambientes onde a troca de dados em tempo real é essencial.
Considere estes critérios ao escolher CAN para seu projeto:
| Critérios | Descrição |
|---|---|
| Proteção contra EOS | Use um diodo de Supressão de Tensão Transiente (TVS) para proteger contra Eventos de Sobretensão Elétrica (EOS) devido a ESD. |
| Trabalho reverso Tensão máxima (VRWM) | Garanta que o diodo TVS possa suportar tensões de até 24V para proteger contra cenários de início de partida. |
| Tensão mínima (VBR) | Selecione um diodo TVS com uma tensão de ruptura que comece a conduzir em níveis seguros durante transientes. |
| Apertando a tensão (VCLAMP) | Escolha um diodo TVS com baixa tensão de aperto para proteger o sistema CAN bus durante eventos transitórios. |
| Integridade do sinal | Garanta baixa capacitância linha a linha no diodo TVS para manter a integridade do sinal durante a operação. |
| Padrões Conformidade | Aderir aos padrões IEC61000-4-2 e AEC-Q para design automotivo. |
Você precisa verificar se seus transceptores suportam a faixa de velocidade e tensão necessária. Procure proteção robusta para EMI e ESD para manter sua comunicação estável. Os modos de baixa potência ajudam você a economizar energia e a operação confiável em temperaturas extremas mantém seu sistema seguro.
Dica: Use CAN quando precisar de mensagens bidirecionais frequentes entre ECUs ou quando o sistema incluir muitos circuitos integrados. A CAN se destaca em redes automotivas grandes e complexas.
Checklist para a seleção PODE:
- Compatibilidade Velocidade: Confirme o transceptor apoia sua taxa exigida dos dados.
- Voltage Range: Verifique se o transceptor lida com flutuações.
- Proteção do EMI e do ESD: Escolha transceptores com características fortes da proteção.
- Modos de baixa potência: selecione dispositivos com modos de espera para eficiência.
- Variação da temperatura: Assegure a operação segura de-40 °C a 125 °C.
Você pode confiar no CAN para aplicativos onde falhas de comunicação podem afetar a segurança ou o desempenho. CAN ajuda a manter a integridade do sinal e suporta a integração com a arquitetura existente, especialmente quando você precisa conectar vários componentes eletrônicos.
Quando escolher o LIN
Você deve escolher LIN quando seu projeto automotivo se concentrar em aplicativos sensíveis ao custo e necessidades de comunicação simples. O LIN funciona melhor para conectar sensores, atuadores e interruptores que não exigem transferência de dados em alta velocidade. Você pode usar o LIN para conectar componentes eletrônicos e circuitos integrados em eletrônica do corpo, controle de temperatura e recursos de conforto.
O LIN é ideal para esses cenários:
- Módulos controle corpo: Iluminação, controle de temperatura, fechaduras e controle de janelas.
- Assento Control: Ajustar a posição do assento, aquecimento e ventilação.
- Controle do espelho: Dobrar/desdobrar espelhos, ajustar posições e aquecimento.
- SensorComunicação: Monitoramento da pressão do pneu e limpadores sensíveis à chuva.
- Interfaces de controle climático e conforto com requisitos de tempo em escala humana.
Nota: O LIN usa um design de fio único, o que reduz a complexidade da fiação e os custos de instalação. Integre facilmente o LIN em sistemas distribuídos onde as necessidades de desempenho são moderadas.
Você deve usar o LIN quando seu sistema tiver menos ECUs e não precisar de comunicação de alto desempenho. O LIN suporta a integração com outros protocolos, muitas vezes atuando como uma sub-rede dentro de uma arquitetura CAN. Essa configuração ajuda a otimizar a largura de banda e manter os custos baixos.
Vantagens do LIN:
- Arquitetura simples para comunicação básica.
- Menor custo para componentes eletrônicos e circuitos integrados.
- Fácil integração com sistemas automotivos existentes.
- Confiável para funções não críticas.
Você pode melhorar a eficiência e reduzir o tamanho do sistema usando LIN em áreas como iluminação interior, ajustes de assento e controles de espelho.
Erros comuns
Você precisa evitar erros frequentes ao selecionar entre CAN e LIN para sua rede de comunicação automotiva. Escolher o protocolo errado pode levar a problemas de desempenho, segurança e confiabilidade.
Erros comuns incluem:
- Negligenciando necessidades de desempenho: Você pode selecionar LIN para um sistema que requer comunicação de alta velocidade, o que pode limitar o desempenho e causar atrasos.
- Ignorando restrições orçamentárias: você pode escolher a CAN para aplicativos simples e sensíveis ao custo, aumentando os custos sem benefícios adicionais.
- Desconsiderando o tipo de comunicação: você pode usar o LIN para sistemas que precisam de mensagens bidirecionais frequentes, o que pode reduzir a eficiência.
- Subestimar a complexidade do sistema: você pode usar o LIN para sistemas grandes com muitas ECUs, levando a problemas de integração.
- Deixar de considerar a integração com a arquitetura existente: Você não pode usar o LIN como uma sub-rede dentro de uma configuração CAN, perdendo oportunidades para otimizar a largura de banda.
Se você escolher o protocolo errado, você arrisca:
- Falta de encriptaçãoQue permite interceptação e manipulação de dados.
- Falta de autenticação, o que pode permitir que usuários não autorizados acessem sua rede.
- Falta de controle de acesso, que pode expor sistemas críticos a invasores.
- Falta de verificação de integridade que permite a injeção de dados maliciosos.
- Falta da redundância, que pode conduzir à operação insegura do veículo durante falhas de comunicação.
⚠️ Sempre combine sua escolha de protocolo com as necessidades de seus componentes eletrônicos e circuitos integrados. Isso ajuda você a construir um sistema automotivo confiável, seguro e eficiente.
Você deve combinar o protocolo com as necessidades do seu sistema automotivo. CAN Bus funciona melhor para sistemas de controle críticos e funções automotivas avançadas, especialmente quando você conecta muitosComponentes eletrônicos e circuitos integrados-A. O LIN Bus atende a aplicações automotivas de baixo custo e não críticas com circuitos integrados simples.A tabela abaixo ajuda você a escolher o protocolo certo:
| Tipo aplicação | Sistema ônibus recomendado |
|---|---|
| Sistemas Controle Crítico | PODE, FlexRay |
| Sistemas de baixo custo e não críticos | LIN |
| Alta largura de banda e sistemas avançados | Ethernet automotiva |
| Multimédia e Infotainment | MAIS |
| Solução Híbrida | Combinação de LIN e CAN |
CAN Bus está se tornando mais importante à medida que a tecnologia automotiva se torna mais complexaE integra recursos IoT. O LIN Bus continua a ser uma escolha inteligente para funções automotivas básicas. Você pode revisar os requisitos do seu sistema ou consultar especialistas para tomar a melhor decisão para seus componentes eletrônicos e circuitos integrados.
FAQ
O que torna o CAN Bus adequado para sistemas automotivos complexos?
CAN Bus permite conectar muitos componentes eletrônicos eCircuitos integrados-A. Você obtém uma comunicação rápida e confiável, que ajuda a gerenciar funções críticas de segurança em redes automotivas. Este protocolo apoia a troca de dados do tempo real entre ECUs para o controle avançado do veículo.
Por que você usa o LIN Bus em funções automotivas básicas?
Você usa o LIN Bus para tarefas simples em sistemas automotivos. Ele conecta sensores e atuadores, como controles de janela ou ajustes do assento. O LIN Bus usa um único fio, o que reduz o custo e a complexidade da fiação para componentes eletrônicos e circuitos integrados.
Você pode combinar o CAN Bus e o LIN Bus em uma rede automotiva?
Você pode combinar ambos os protocolos em projetos automotivos. O CAN Bus lida com comunicação crítica e de alta velocidade entre circuitos integrados. O LIN Bus gerencia tarefas de baixa velocidade e não críticas para componentes eletrônicos. Esta combinação ajuda a otimizar o desempenho e o custo do seu veículo.
Como a escolha do protocolo afeta a confiabilidade do componente eletrônico?
Sua escolha afeta a confiabilidade. O CAN Bus oferece verificação avançada de erros, que protege componentes eletrônicos e circuitos integrados em sistemas de segurança automotiva. O LIN Bus fornece detecção básica de erros, que funciona para funções não críticas, mas pode não se adequar aos controles vitais.
O CAN Bus e o LIN Bus suportam futuras tecnologias automotivas?
Ambos os protocolos suportam futuras necessidades automotivas.PODE ônibusAdapta-se a novos circuitos integrados para assistência avançada ao condutor. O LIN Bus continua a servir componentes eletrônicos simples, ajudando você a gerenciar recursos de conforto e conveniência à medida que a tecnologia evolui.