

Stepper Motors18 Products
Sort by:
| Image | Part Number | Manufacturer | Description | Availability | Actions | |
|---|---|---|---|---|---|---|
 PDF | 1207 | Pololu | STPR MTR BIPOLAR 7.4V 0.28A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1208 | Pololu | STPR MTR BIPOLAR 10V 0.5A/PHASE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1209 | Pololu | STPR MTR BIPOLAR 2.7V 1A/PHASE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1472 | Pololu | STPR MTR UNI/BIPLR 7.4V 1A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 2689 | Pololu | STEPPER MOTOR W/18CM LEAD SCREW | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1473 | Pololu | STPR MTR UNI/BIPLR 3.6V 2A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 2690 | Pololu | STEPPER MOTOR W/38CM LEAD SCREW | In Stock | MOQ: 1 Hover to quote | |
 PDF | 2267 | Pololu | STPR MTR BIPOLAR 2.8V 1.7A/PHASE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1474 | Pololu | STPR MTR BIPOLAR 2.5V 2.8A/PHASE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1200 | Pololu | STPR MTR UNI/BIPLR 4V 1.2A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 2268 | Pololu | STEPPER MOTOR W/28CM LEAD SCREW | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1475 | Pololu | STPR MTR UNI/BIPLR 4.5V 2A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1204 | Pololu | STPR MTR BIPOLAR 3.9V 0.6A/PHASE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1476 | Pololu | STPR MTR UNI/BIPLR 5.7V 1A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1205 | Pololu | STPR MTR BIPOLAR 3.8V 0.67A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1477 | Pololu | STPR MTR UNI/BIPLR 8.6V 1A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1206 | Pololu | STPR MTR BIPOLAR 4.5V 0.67A/PHSE | In Stock | MOQ: 1 Hover to quote | |
 PDF | 1478 | Pololu | STPR MTR BIPOLAR 3.2V 2.8A/PHASE | In Stock | MOQ: 1 Hover to quote |
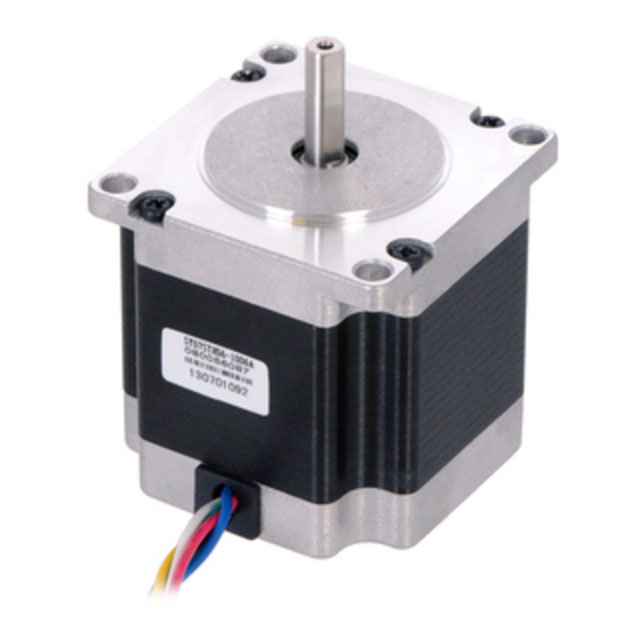
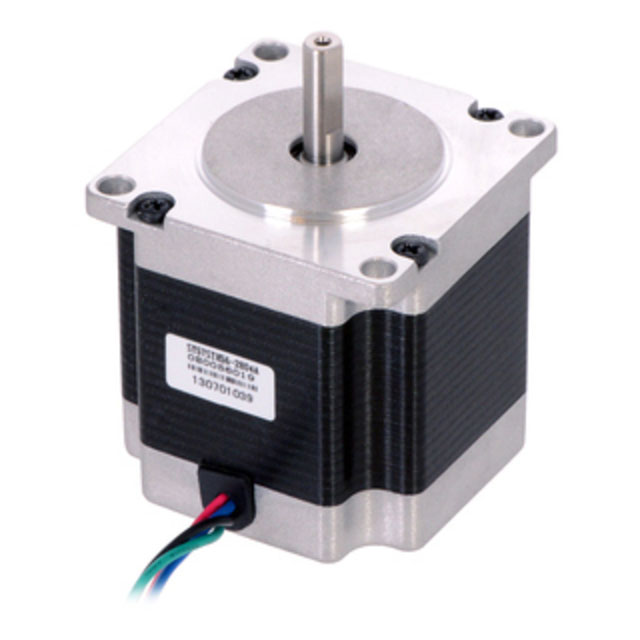
Stepper motors are DC voltage motion actuators that move in discrete steps. Multiple sets of coils organized in groups called "phases" determine the motors armature position. Energizing each phase in sequence causes armature rotation one step at a time. With computer or microcontroller managed stepping, precise positioning and/or speed control is achieved. Steppers are selected by torque, steps per revolution, step angle, NEMA frame size, coil resistance, polarity and shaft features.