Selección del mejor protocolo automotriz CAN Bus o LIN Bus
A menudo se enfrenta a la elección entre CAN Bus y el protocolo LIN Bus al diseñar sistemas automotrices. El bus CAN domina el escenario

A menudo se enfrenta a la elección entre CAN Bus y el protocolo LIN Bus al diseñar sistemas automotrices. CAN Bus domina escenarios que exigen alta velocidad y fiabilidad, especialmente enVehículos eléctricosComponentes electrónicos complejos. LIN Bus se adapta a funciones automotrices más simples y sensibles a los costos donde la velocidad es menos crítica.
Los principales factores de decisión incluyen:
- Velocidad y velocidad de datos
- Complejidad
- Fiabilidad
- Costo
Puede utilizar la comparación de bus can vs lin bus y la guía de decisión para que las características del protocolo coincidan con sus necesidades automotrices.
Puntos clave
- Elija CAN Bus paraComunicación de alta velocidad, confiableEn sistemas automotrices complejos. Se destaca en aplicaciones críticas para la seguridad, como el control del motor y la asistencia avanzada al conductor.
- Opte por LIN Bus cuando trabaje enProyectos sensibles a los costosQue requieren una comunicación simple. Es ideal para funciones básicas como controlar ventanas y luces.
- Considere el número de dispositivos y la velocidad requerida al seleccionar un protocolo. CAN admite muchas ECU, mientras que LIN es adecuado para tareas menos exigentes.
- Recuerde que CAN y LIN pueden trabajar juntos en un vehículo. Utilice CAN para tareas críticas y LIN para conexiones más sencillas y de bajo coste.
- Evalúe cuidadosamente las necesidades de su sistema. La coincidencia del protocolo correcto con sus componentes automotrices garantiza un funcionamiento eficiente y seguro.
CAN Bus vs LIN Bus

Tabla de comparación
Cuando comparas bus can vs bus lin, ves claras diferencias en cómo soporta cada protocoloComponentes electrónicos automotricesYCircuitos integrados.La siguiente tabla le ofrece una visión general rápida de sus principales características. Esto le ayuda a decidir qué protocolo se ajusta a sus necesidades de comunicación entre los dispositivos de su vehículo.
| Característica | CAN Bus | LIN Autobús |
|---|---|---|
| Velocidad | Altas velocidades de datos para aplicaciones sensibles al rendimiento | Menor velocidad adecuada para tareas básicas |
| Costo | Más caro debido a la complejidad | Rentable con diseño de un solo cable |
| Complejidad | Más complejo con diseño multi-master | Más simple con un solo maestro |
| Fiabilidad | Alta fiabilidad con gestión de errores avanzada | Sólo detección de errores básicos |
| Aplicaciones típicas | Redes grandes con muchas ECUs, sistemas de seguridad crítica | Sistemas pequeños y sensibles a los costos, como las características interiores |
Puede utilizar bus cuando su sistema automotriz necesita una comunicación rápida y confiable entre muchas unidades de control electrónico (ECU). Esto es importante para los circuitos integrados que manejan las características de seguridad o la gestión del motor. El bus CAN es compatible con la transferencia de datos de alta velocidad, que es esencial para la comunicación en tiempo real en sistemas avanzados de asistencia al conductor (ADAS) y conducción autónoma. A menudo se encuentra bus can en el control del tren motriz, control del chasis y sistemas de infoentretenimiento. Estos sistemas se basan en protocolos de comunicación complejos para mantener todos los componentes electrónicos trabajando juntos.
Por otro lado, lin bus funciona mejor para aplicaciones simples y sensibles al costo. Usted usa el bus lin para tareas como controlar cerraduras de puertas, ajustes de asientos e iluminación. El diseño de cable único del bus lin reduce la complejidad y el costo del cableado. Esto lo hace ideal para conectarSensoresY actuadores que no necesitan comunicación de alta velocidad. El bus Lin a menudo se conecta a circuitos integrados que administran funciones básicas, como los controles de ventanas o la iluminación interior.
Punta:
Cuando elija entre can bus vs lin bus, piense en la cantidad de dispositivos, la velocidad que necesita y cuán crítica es la comunicación para la seguridad.
Casos de uso típicos en vehículos modernos
Puede ver cómo el bus vs lin bus puede encajar en diferentes sistemas automotrices al observar sus casos de uso más comunes. La siguiente tabla muestra dónde sobresale cada protocolo.
| Tipo de autobús | Caso de uso | Descripción |
|---|---|---|
| LIN | Gestión de dispositivos internos | Utilizado para gestionar funcionalidades como cerraduras de puertas, ajustes de asientos y ventanas eléctricas debido a su moderada eficiencia de ancho de banda. |
| LIN | Gestión de la iluminación | Controla la iluminación interior y exterior, lo que permite la modulación de la intensidad de la luz y la activación selectiva. |
| LIN | Sensores y diagnósticos | Conecta los sensores para la recopilación de datos sobre la temperatura del motor, el nivel de combustible y la presión de los neumáticos, lo que ayuda en los diagnósticos a bordo. |
| LIN | Integración con otras redes | Funciona con CAN para tareas como la gestión de lavadores de ventanas, coordinación de operaciones para la eficiencia. |
| PUEDE | Control del tren de potencia | Coordina el motor, la transmisión y los elementos relacionados para un rendimiento óptimo. |
| PUEDE | Control del chasis | Integra sistemas como control de tracción, ABS y airbags para mayor seguridad. |
| PUEDE | Sistemas de infoentretenimiento | Gestiona los dispositivos multimedia, la navegación y el entretenimiento dentro del vehículo. |
| PUEDE | Herramientas de diagnóstico | Permite el diagnóstico en tiempo real de los problemas y el rendimiento del vehículo. |
| PUEDE | Telemática | Facilita la comunicación de vehículo a infraestructura (V2I) y de vehículo a vehículo (V2V). |
| PUEDE | Gestión de flotas | Permite el control centralizado y la monitorización de una flota de vehículos. |
Observe que el bus can admite aplicaciones más complejas y críticas para la seguridad. Estos a menudo implican múltiples circuitos integrados y requieren protocolos de comunicación robustos. Lin bus, sin embargo, maneja tareas más simples y ayuda a reducir el costo y el peso del cableado en el vehículo.
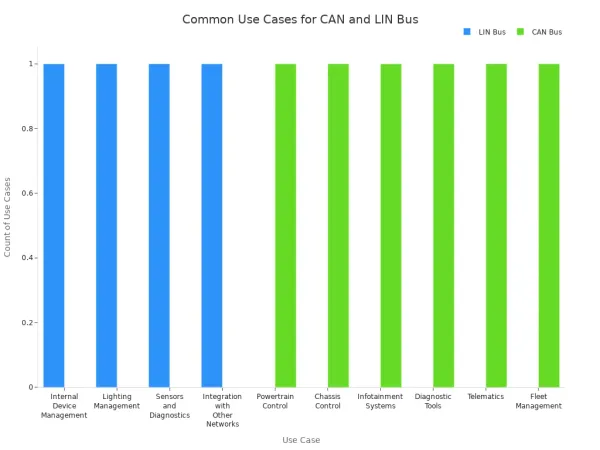
Este gráfico muestra que el bus puede cubrir una gama más amplia de casos de usoEn sistemas automotrices. Usted ve más aplicaciones para el bus can en áreas que exigen comunicación de alta velocidad y confiable. Lin bus sigue siendo popular para funciones básicas donde el costo y la simplicidad son más importantes.
Avances y tendencias recientes
También debe considerar cómo los avances recientes afectan su elección entre can bus vs lin bus. El auge de ADAS y los vehículos autónomos aumenta la necesidad de vehículos avanzadosProtocolos de comunicación. El bus de Can ahora juega un papel más importante en la conexión de componentes electrónicos y circuitos integrados que admiten estas características. El crecimiento del Internet de las Cosas (IoT) y la computación en la nube también impulsa nuevos usos para el bus can, como la telemática y la gestión de flotas.
Lin bus continúa ofreciendo una solución rentable para las interacciones simples del dispositivo. Su diseño de un solo cable reduce el tamaño y el peso del sistema, lo cual es importante para aplicaciones automotrices con espacio limitado. Usted se beneficia de una instalación más rápida y de costes más bajos cuando usted utiliza el autobús de lin para las necesidades básicas de la comunicación.
Nota:
Ambos pueden autobús y bus lin a menudo trabajan juntos en vehículos modernos. Puede utilizar el bus de lata para una comunicación de alta velocidad y crítica para la seguridad y el bus lin para conexiones simples y de bajo costo entre sensores y actuadores.
Cuando se compara puede bus vs bus lin, siempre coincide con el protocolo a las necesidades de sus componentes electrónicos y circuitos integrados. Esto asegura que su sistema automotriz funcione de manera eficiente y segura.
Descripción general de CAN Bus
Características CAN Bus
Utilice CAN Bus, también conocido como red de área de controlador, cuando necesite una comunicación confiable entre muchas ECU en su sistema automotriz. CAN Bus sigue estrictoNormas ISOPara asegurarse de que sus componentes electrónicos y circuitos integrados funcionen juntos sin problemas. Aquí hay una tabla que muestra las principales características técnicas definidas por las últimas normas ISO:
| Estándar ISO | Descripción |
|---|---|
| ISO 11898-5:2007 | Admite velocidades de transmisión de hasta 1 Mbit/s, incluye características de baja potencia para vehículos de carretera. |
| ISO 11898-6:2013 | Añade reactivación selectiva, lo que le permite activar ECUs específicas utilizando marcos CAN configurables. |
| ISO 16845-1:2016 | Proporciona métodos para comprobar si su implementación CAN cumple los estándares. |
| ISO 16845-2:2018 | Establece los requisitos para probar las funciones selectivas de despertador del transceptor CAN. |
Usted se beneficia de características como robustez contra perturbaciones eléctricas e interferencia electromagnética. CAN Bus utiliza un manejo avanzado de errores, por lo que sus ECU pueden retransmitir mensajes defectuosos y mantener los datos seguros. El arbitraje permite que su sistema priorice los datos importantes, lo que ayuda a evitar colisiones y mantiene la comunicación rápida.
Consejo: CAN Bus admite redes automotrices complejas, lo que lo hace ideal para conectar circuitos integrados que controlan la seguridad y el rendimiento.
Fortalezas de CAN Bus
CAN Bus te daIntegridad de datos fuerteY la robustez de la red. Puede confiar en su detección de errores, que utiliza mecanismos como CRC para mantener sus datos precisos. El confinamiento de fallas ayuda a su red a mantenerse saludable al aislar las ECU problemáticas. Señalización diferencial significa que su red de área de controlador resiste el ruido eléctrico, por lo que su sistema automotriz funciona bien incluso en entornos hostiles.
| Fortalezas | Descripción |
|---|---|
| Capacidades de detección de errores | Mecanismos sofisticados aseguran una alta integridad de datos y comunicaciones confiables. |
| Confinamiento de fallas | Aísla las ECUs defectuosas para mantener la integridad de la red. |
| Resistencia a la interferencia | La señalización diferencial protege contra el ruido eléctrico. |
Usted ve estas fortalezas en acción cuando los componentes electrónicos y los circuitos integrados de su vehículo necesitan compartir información de forma rápida y segura.
Aplicaciones CAN Bus
Encontrará CAN Bus en el corazón de muchos sistemas de automoción. Conecta las ECU y permite que sus unidades de control electrónico intercambien datos de manera eficiente. CAN Bus esMás barato que EthernetY más fiable que LIN para tareas complejas. Puede utilizar el bus CAN para el control del tren motriz, el control del chasis, el infoentretenimiento y el diagnóstico. También es compatible con la gestión telemática y de flotas, ayudando a su vehículo a comunicarse con otros vehículos e infraestructura.
- Control del tren de potencia: coordina el motor y la transmisión para un mejor rendimiento.
- Control de chasis: integra control de tracción, ABS y airbags para mayor seguridad.
- Infotainment: Gestiona sistemas multimedia y de navegación.
- Diagnóstico: Permite la supervisión y resolución de problemas en tiempo real.
- Telemática: admite la comunicación de vehículo a vehículo y de vehículo a infraestructura.
A medida que avanza la tecnología automotriz, debe comprender cómo los protocolos como CAN Bus conectan suComponentes electrónicos y circuitos integrados. Este conocimiento le ayuda a construir vehículos más seguros e inteligentes.
Descripción general del bus LIN
Características del bus LIN
Usted usa el bus lin, oRed de interconexión local, Cuando necesite una forma sencilla y rentable de conectar componentes electrónicos en su sistema automotriz. Este protocolo funciona bien para la comunicación básica entre ECUs y circuitos integrados que no requieren alta velocidad. El bus lin utiliza un solo cable, lo que reduce la complejidad del cableado y le ayuda a ahorrar en costos de instalación.
Aquí hay una tabla que muestra las características principales de la red de interconexión local, basada en las últimas especificaciones:
| Característica | Descripción |
|---|---|
| Bajo costo | Opción asequible debido a los bajos requisitos de hardware y la facilidad de uso. |
| Baja velocidad | Funciona a 1,2 a 20,0 kbps, adecuado para aplicaciones con bajas necesidades de datos. |
| Arquitectura maestro-esclavo | La comunicación es iniciada por un nodo maestro que gestiona el intercambio de datos con los esclavos. |
| Comunicación de un solo cable | Reduce la complejidad del cableado mediante el uso de una sola línea para la transmisión de datos. |
Las características principales del protocolo incluyen:
- Maestro único, hasta 16 esclavos (sin arbitraje de bus).
- Comunicaciones de un solo cable de hasta 19,2 kbit/s a una longitud de bus de 40 metros.
- Tiempos de latencia garantizados.
- Longitud variable de la trama de datos (2, 4 y 8 bytes).
- Flexibilidad de configuración.
- Checksum de datos y detección de errores.
Fortalezas del bus LIN
Usted se beneficia del bus lin porque ofreceCosto-efectividad y simplicidad. La red de interconexión local le permite conectar ECUs y circuitos integrados con un hardware mínimo. Sólo necesita un solo cable y unos pocosMicrocontroladores. Esta configuración reduce el número de componentes y hace que el protocolo sea fácil de implementar.
- Rentable: el bus lin reduce la complejidad del cableado y reduce el número de piezas.
- Simplicidad: Puede configurar la red de interconexión local rápidamente, lo que ahorra tiempo de desarrollo.
- Flexibilidad: el protocolo admite diferentes longitudes de datos y tiempos de respuesta garantizados.
- Detección de errores: las sumas de comprobación incorporadas lo ayudan a mantener una comunicación confiable entre las ECU.
Aplicaciones de bus LIN
A menudo utiliza el bus lin en sistemas automotrices para tareas que no necesitan transferencia de datos a alta velocidad. La red de interconexión local conecta las ECU y los circuitos integrados en áreas como:
- Cerraduras de puerta del poder
- Ventanas eléctricas
- Asientos de potencia
- Espejos eléctricos
- Limpiaparabrisas
- Calentadores de asiento
- Controles de calefacción y aire acondicionado
- Luces interiores
- Controles climáticos
- Controles del volante (control de crucero, limpiaparabrisas, radio)
- Techo solar
- Tronco
Usted ve el bus lin en estas aplicaciones porque mantiene los costos bajos y el cableado simple. El protocolo le ayuda a administrar las funciones básicas de su vehículo, por lo que es una opción práctica para muchos componentes electrónicos automotrices.
Diferencias clave

Velocidad y tasa de datos
Debe considerar la velocidad al elegir un protocolo para su sistema automotriz. CAN admite la comunicación de alta velocidad entre las ECU, lo cual es importante para el control y la seguridad en tiempo real.CAN puede alcanzar hasta 1 Mbps en modo de alta velocidadE incluso 15 Mbps con velocidad de datos flexible. Esto permite que sus componentes electrónicos y circuitos integrados intercambien datos rápidamente. LIN, por otra parte, opera a velocidades mucho más bajas, típicamente por debajo de 20 kbps. Esto hace que LIN sea adecuado para tareas simples donde no se necesita una transferencia de datos rápida, como controlar las luces interiores o los ajustes del asiento.
| Tipo de autobús | Velocidad de datos máxima | Tasa de datos típica |
|---|---|---|
| CAN (baja velocidad) | 125 kbps | N/A |
| CAN (Alta Velocidad) | 1 Mbps | N/A |
| CAN (Velocidad de datos flexible) | 15 Mbps | N/A |
| LIN | N/A | <20 kbps |
Costo y complejidad
Costo y complejidad juegan un papel importante en la selección del protocolo. CAN requiere hardware y software más complejos en sus ECUs. Esto aumenta el costo, pero también trae características avanzadas para la comunicación y el rendimiento. LIN ofrece una solución más simple y barata. Solo necesita un solo cable para LIN, lo que reduce los costos de cableado e instalación. LIN es fácil de implementar en componentes electrónicos y circuitos integrados que no necesitan alto rendimiento.
| Característica | CAN Bus | LIN Autobús |
|---|---|---|
| Costo | Mayor debido a hardware complejo | Menor debido a un protocolo más simple |
| Complejidad | Más complejo | Más simple, más fácil de implementar |
| Cableado | Requiere múltiples cables | Requiere sólo un alambre |
| Idoneidad de la aplicación | Adecuado para aplicaciones de alto rendimiento | Ideal para sistemas distribuidos de bajo costo |
LIN simplifica el cableado y reduce el tamaño y peso del sistemaPor lo que es una buena opción para los diseños de automóviles con espacio limitado.
Fiabilidad y comprobación de errores
La fiabilidad es fundamental para las ECU automotrices, especialmente en los sistemas de seguridad. CAN utiliza la comprobación avanzada de errores, como CRC, supervisión de bits y comprobación de tramas. Si se produce un error, CAN puede retransmitir mensajes e incluso aislar nodos defectuosos. Esto hace que CAN sea muy confiable para los componentes electrónicos que controlan los frenos o los motores. LIN utiliza la detección de errores básica, como las sumas de comprobación y la paridad de la cabecera. No soporta retransmisión automática o manejo avanzado de fallas. LIN funciona bien para comunicaciones no críticas, pero no coincide con la confiabilidad de CAN para funciones automotrices importantes.
| Característica | CAN Bus | LIN Autobús |
|---|---|---|
| Métodos de detección de errores | Múltiples mecanismos (CRC, monitoreo de bits, verificaciones de tramas) | Sumas de comprobación simples, paridad de encabezado |
| Señalización de error | Marcos de error automáticos, notificación en toda la red | Limitada, afecta sólo a la comunicación maestro-esclavo |
| Manejo de retransmisión | Retransmisión automática | No hay soporte de retransmisión |
| Confinamiento de fallas | Puede aislar nodos defectuosos | Sin confinamiento de fallas avanzado |
| Fiabilidad general | Alto, adecuado para sistemas de seguridad crítica | Moderado, para la electrónica no crítica |
Aplicación Fit
Debe adaptar el protocolo a las necesidades de su sistema automotriz. CAN se adapta mejor a aplicaciones que necesitan una comunicación rápida y confiable entre muchas ECU, como el tren motriz, el chasis y el infoentretenimiento. Estos sistemas se basan en circuitos integrados complejos y exigen un alto rendimiento.LIN es ideal para las tareas simples, costo-sensiblesComo el control de ventanas, espejos o luces interiores. LIN conecta sensores e interruptores en la electrónica del cuerpo, donde la velocidad y la confiabilidad son menos críticas.
| Tipo de autobús | Aplicaciones |
|---|---|
| PUEDE | Vehículos de pasajeros, camiones, autobuses, equipos agrícolas, aviación, automatización industrial, robótica |
| LIN | Cerraduras de puertas eléctricas, ventanas eléctricas, asientos eléctricos, Limpiaparabrisas, controles de clima, luces interiores, controles de volante |
Cuando diseñe su red automotriz, siempre considere cómo cada protocolo soporta las necesidades de comunicación de sus ECUs y circuitos integrados.
Guía de decisión
Cuándo elegir puede
Debe seleccionar CAN cuando su sistema automotriz exige una comunicación rápida y confiable entre muchos componentes electrónicos y circuitos integrados. CAN es compatible con redes de alto rendimiento, lo que lo hace ideal para sistemas críticos para la seguridad como el control del motor, el frenado y la asistencia avanzada al conductor. Puede maximizar el rendimiento mediante el uso de CAN en entornos donde el intercambio de datos en tiempo real es esencial.
Tenga en cuenta estos criterios al elegir CAN para su diseño:
| Criterios | Descripción |
|---|---|
| Protección de EOS | Utilice un diodo de supresión de voltaje transitorio (TVS) para proteger contra eventos de sobreesfuerzo eléctrico (EOS) debido a ESD. |
| Voltaje máximo de trabajo inverso (VRWM) | Asegúrese de que el diodo TVS puede manejar voltajes de hasta 24V para proteger contra escenarios de arranque. |
| Tensión de ruptura mínima (VBR) | Seleccione un diodo TVS con un voltaje de ruptura que comience a conducir a niveles seguros durante los transitorios. |
| Tensión de sujeción (VCLAMP) | Elija un diodo TVS con un voltaje de sujeción bajo para proteger el sistema de bus CAN durante eventos transitorios. |
| Integridad de la señal | Asegure la capacitancia de línea a línea baja en el diodo TVS para mantener la integridad de la señal durante la operación. |
| Estándares de cumplimiento | Adoptar los estándares de IEC61000-4-2 y AEC-Q para el diseño automotriz. |
Debe comprobar que sus transceptores admiten la velocidad y el rango de voltaje requeridos. Busque protección robusta EMI y ESD para mantener su comunicación estable. Los modos de bajo consumo le ayudan a ahorrar energía, y la operación confiable en temperaturas extremas mantiene su sistema seguro.
Consejo: Utilice CAN cuando necesite mensajes bidireccionales frecuentes entre las ECU o cuando su sistema incluya muchos circuitos integrados. CAN sobresale en redes automotrices grandes y complejas.
Lista de verificación para la selección CAN:
- Compatibilidad de velocidad: Confirme que el transceptor admite la velocidad de datos requerida.
- Rango de voltaje: Asegúrese de que el transceptor maneje las fluctuaciones de voltaje.
- Protección EMI y ESD: elija transceptores con características de protección sólidas.
- Modos de baja potencia: seleccione dispositivos con modos de espera para mayor eficiencia.
- Gama de temperaturas: Asegure la operación confiable de-40 °C a 125 °C.
Puede confiar en CAN para aplicaciones en las que las fallas de comunicación podrían afectar la seguridad o el rendimiento. CAN le ayuda a mantener la integridad de la señal y admite la integración con la arquitectura existente, especialmente cuando necesita conectar varios componentes electrónicos.
Cuándo elegir Lin
Debe elegir LIN cuando su proyecto automotriz se centra en aplicaciones sensibles a los costos y necesidades de comunicación simples. LIN funciona mejor para la conexión de sensores, actuadores e interruptores que no requieren transferencia de datos a alta velocidad. Puede utilizar LIN para vincular componentes electrónicos y circuitos integrados en la electrónica del cuerpo, el control del clima y las características de confort.
LIN es óptimo para estos escenarios:
- Módulos de control del cuerpo: Iluminación, control de la temperatura, cerraduras de puerta, y control de ventana.
- Control del asiento: Ajuste de la posición del asiento, calefacción y ventilación.
- Control de espejo: espejos plegables/desplegables, posiciones de ajuste y calefacción.
- SensorComunicación: Monitoreo de la presión de los neumáticos y limpiaparabrisas con detección de lluvia.
- Interfaces de control climático y características de confort con requisitos de temporización a escala humana.
Nota: LIN utiliza un diseño de un solo cable, lo que reduce la complejidad del cableado y los costos de instalación. Puede integrar LIN fácilmente en sistemas distribuidos donde las necesidades de rendimiento son moderadas.
Debe utilizar LIN cuando el sistema tenga menos ECU y no necesite comunicación de alto rendimiento. LIN admite la integración con otros protocolos, a menudo actuando como una subred dentro de una arquitectura CAN. Esta configuración le ayuda a optimizar el ancho de banda y mantener los costos bajos.
Ventajas de LIN:
- Arquitectura simple para la comunicación básica.
- Menor costo para componentes electrónicos y circuitos integrados.
- Fácil integración con sistemas de automoción existentes.
- Confiable para funciones no críticas.
Puede mejorar la eficiencia y reducir el tamaño del sistema mediante el uso de LIN en áreas como iluminación interior, ajustes de asiento y controles de espejo.
Errores comunes
Debe evitar errores frecuentes al seleccionar entre CAN y LIN para su red de comunicación automotriz. La elección del protocolo equivocado puede conducir a problemas con el rendimiento, la seguridad y la fiabilidad.
Los errores comunes incluyen:
- Desatender las necesidades de rendimiento: puede seleccionar LIN para un sistema que requiere comunicación de alta velocidad, lo que puede limitar el rendimiento y causar retrasos.
- Ignorar las restricciones presupuestarias: puede elegir CAN para aplicaciones simples y sensibles a los costos, aumentando los costos sin beneficios adicionales.
- Juzgar mal el tipo de comunicación: podría usar LIN para sistemas que necesitan mensajes bidireccionales frecuentes, lo que puede reducir la eficiencia.
- Subestimación de la complejidad del sistema: puede usar LIN para sistemas grandes con muchas ECU, lo que lleva a problemas de integración.
- No considerar la integración con la arquitectura existente: no puede usar LIN como una subred dentro de una configuración de CAN, perdiendo oportunidades para optimizar el ancho de banda.
Si elige el protocolo equivocado, corre el riesgo de:
- Falta de encriptación, Lo que puede permitir la interceptación y manipulación de datos.
- Falta de autenticación, lo que puede permitir que usuarios no autorizados accedan a su red.
- Falta de control de acceso, lo que puede exponer los sistemas críticos a los atacantes.
- Falta de verificación de integridad, que puede permitir la inyección de datos maliciosos.
- Falta de redundancia, lo que puede resultar en una operación insegura del vehículo durante las fallas de comunicación.
⚠️ Siempre coincida con su elección de protocolo a las necesidades de sus componentes electrónicos y circuitos integrados. Esto le ayuda a construir un sistema automotriz confiable, seguro y eficiente.
Debe hacer coincidir el protocolo con las necesidades de su sistema automotriz. CAN Bus funciona mejor para sistemas de control críticos y funciones automotrices avanzadas, especialmente cuando conecta muchosComponentes electrónicos y circuitos integrados. LIN Bus se adapta a aplicaciones automotrices de bajo costo y no críticas con circuitos integrados simples.La siguiente tabla le ayuda a elegir el protocolo correcto:
| Tipo de aplicación | Sistema de bus recomendado |
|---|---|
| Sistemas críticos de control | PUEDE, FlexRay |
| Sistemas de bajo costo y no críticos | LIN |
| Alto ancho de banda y sistemas avanzados | Ethernet automotriz |
| Multimedia y Infotainment | LA MAYORÍA |
| Solución híbrida | Combinación de LIN y CAN |
CAN Bus es cada vez más importante a medida que la tecnología automotriz se vuelve más complejaE integra características de IoT. LIN Bus sigue siendo una opción inteligente para funciones automotrices básicas. Puede revisar los requisitos de su sistema o consultar a expertos para tomar la mejor decisión para sus componentes electrónicos y circuitos integrados.
Preguntas frecuentes
¿Qué hace que CAN Bus sea adecuado para sistemas automotrices complejos?
CAN Bus le permite conectar muchos componentes electrónicos yCircuitos integrados. Usted obtiene una comunicación rápida y confiable, que ayuda a administrar funciones críticas para la seguridad en redes automotrices. Este protocolo admite el intercambio de datos en tiempo real entre las ECU para el control avanzado del vehículo.
¿Por qué utiliza LIN Bus en funciones básicas de automoción?
Se utiliza LIN Bus para tareas sencillas en sistemas de automoción. Conecta sensores y actuadores, como controles de ventana o ajustes de asiento. LIN Bus utiliza un solo cable, lo que reduce el costo y la complejidad del cableado para componentes electrónicos y circuitos integrados.
¿Puede combinar CAN Bus y LIN Bus en una red de automoción?
Puede combinar ambos protocolos en diseños automotrices. El bus CAN maneja la comunicación crítica de alta velocidad entre circuitos integrados. LIN Bus gestiona tareas de baja velocidad y no críticas para componentes electrónicos. Esta combinación ayuda a optimizar el rendimiento y el costo en su vehículo.
¿Cómo afecta la elección del protocolo a la fiabilidad de los componentes electrónicos?
Su elección afecta la confiabilidad. CAN Bus ofrece una comprobación avanzada de errores, que protege los componentes electrónicos y los circuitos integrados en los sistemas de seguridad del automóvil. LIN Bus proporciona detección de errores básica, que funciona para funciones no críticas, pero puede no adaptarse a los controles vitales.
¿CAN Bus y LIN Bus apoyan las tecnologías automotrices futuras?
Ambos protocolos apoyan las futuras necesidades automotrices.CAN BusSe adapta a los nuevos circuitos integrados para una asistencia avanzada al conductor. LIN Bus continúa sirviendo componentes electrónicos simples, lo que le ayuda a administrar las características de comodidad y conveniencia a medida que la tecnología evoluciona.