

Placas y módulos controladores de motores15 Productos
Ordenar por:
| Imagen | Número de pieza | Fabricante | Descripción | Disponibilidad | Acciones | |
|---|---|---|---|---|---|---|
 PDF | BLDC50-BL34E21-02 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 5 Pase para cotizar | |
 PDF | R701 | Lin Engineering | STEPPER DRIVE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | R325P | Lin Engineering | STEPPER DRIVE | En stock | MOQ: 1 Pase para cotizar | |
PDF | BLDC50-BL17E19-01 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | R356 | Lin Engineering | STEPPER DRIVE / CONTROLLER | En stock | MOQ: 1 Pase para cotizar | |
PDF | BLDC50-BL23E33-02 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 10 Pase para cotizar | |
PDF | BLDC50-BL23E22-01 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 10 Pase para cotizar | |
PDF | BLDC100-BL34E34-01 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 1 Pase para cotizar | |
PDF | BLDC100-BL34E27-02 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 1 Pase para cotizar | |
PDF | BLDC100-BL17E40-01 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | R725-RO | Lin Engineering | STEPPER DRIVE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | R208 | Lin Engineering | STEPPER DRIVE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | R701P-RO | Lin Engineering | STEPPER DRIVE | En stock | MOQ: 1 Pase para cotizar | |
PDF | BLDC50-BL17E28-01 | Lin Engineering | BLDC DRIVE | En stock | MOQ: 10 Pase para cotizar | |
 PDF | R256 | Lin Engineering | STEPPER DRIVE / CONTROLLER | En stock | MOQ: 1 Pase para cotizar |
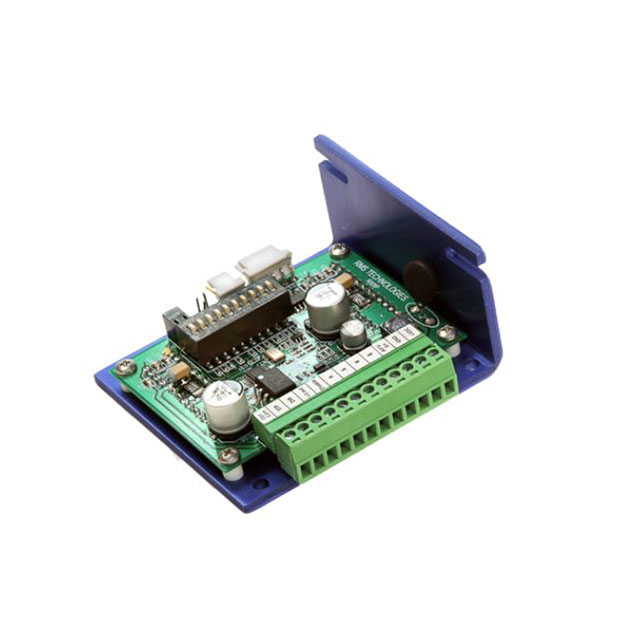
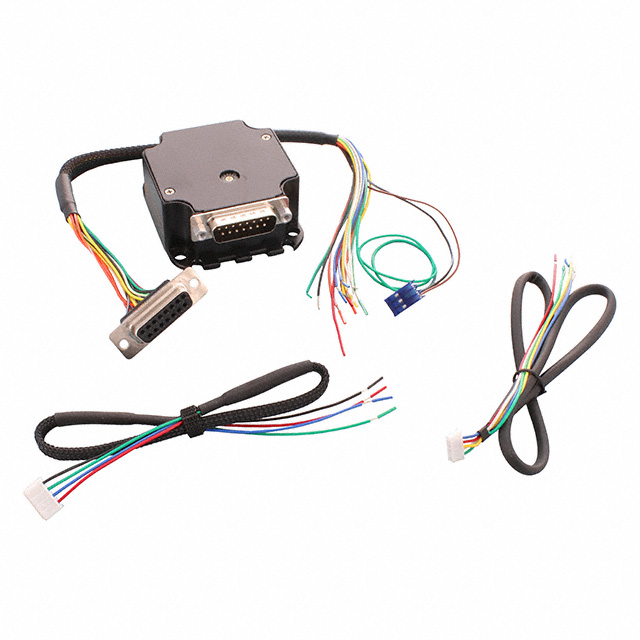
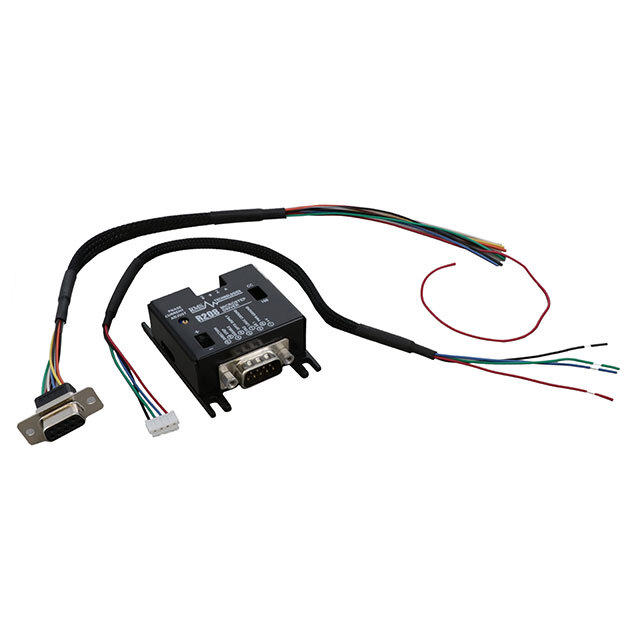
Las placas y módulos controladores de motores contienen la circuitería necesaria para suministrar la potencia adecuada y el control para motores de CA, motores de CC con escobillas y sin escobillas, servomotores y motores paso a paso. Las placas tienen un diseño de bastidor abierto y se montan a discreción del usuario. Los módulos incluyen algún tipo de carcasa y se montan mediante bridas, lengüetas y riel DIN. Las interfaces de comunicación pueden incluir: CAN, PWM, RS-232, RS-422, RS-485, SPI, I2C, USB, paso/dirección, UART y EtherCAT.