

Motores paso a paso18 Productos
Ordenar por:
| Imagen | Número de pieza | Fabricante | Descripción | Disponibilidad | Acciones | |
|---|---|---|---|---|---|---|
 PDF | 1207 | Pololu | STPR MTR BIPOLAR 7.4V 0.28A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1208 | Pololu | STPR MTR BIPOLAR 10V 0.5A/PHASE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1209 | Pololu | STPR MTR BIPOLAR 2.7V 1A/PHASE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1472 | Pololu | STPR MTR UNI/BIPLR 7.4V 1A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 2689 | Pololu | STEPPER MOTOR W/18CM LEAD SCREW | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1473 | Pololu | STPR MTR UNI/BIPLR 3.6V 2A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 2690 | Pololu | STEPPER MOTOR W/38CM LEAD SCREW | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 2267 | Pololu | STPR MTR BIPOLAR 2.8V 1.7A/PHASE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1474 | Pololu | STPR MTR BIPOLAR 2.5V 2.8A/PHASE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1200 | Pololu | STPR MTR UNI/BIPLR 4V 1.2A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 2268 | Pololu | STEPPER MOTOR W/28CM LEAD SCREW | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1475 | Pololu | STPR MTR UNI/BIPLR 4.5V 2A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1204 | Pololu | STPR MTR BIPOLAR 3.9V 0.6A/PHASE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1476 | Pololu | STPR MTR UNI/BIPLR 5.7V 1A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1205 | Pololu | STPR MTR BIPOLAR 3.8V 0.67A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1477 | Pololu | STPR MTR UNI/BIPLR 8.6V 1A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1206 | Pololu | STPR MTR BIPOLAR 4.5V 0.67A/PHSE | En stock | MOQ: 1 Pase para cotizar | |
 PDF | 1478 | Pololu | STPR MTR BIPOLAR 3.2V 2.8A/PHASE | En stock | MOQ: 1 Pase para cotizar |
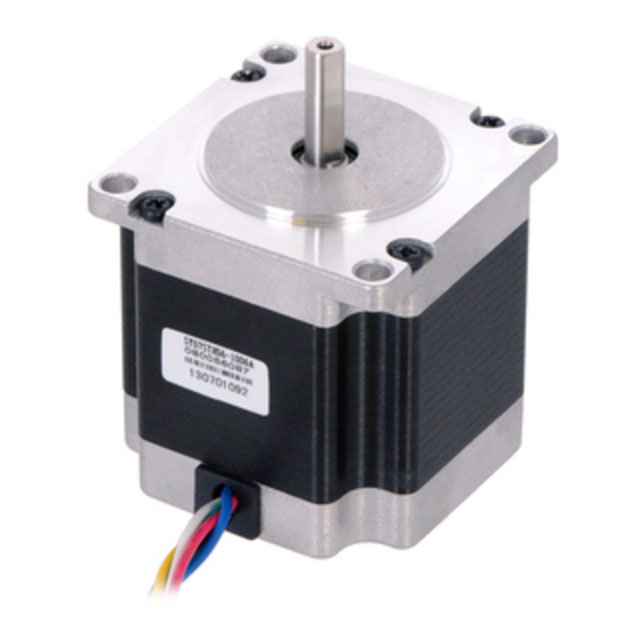
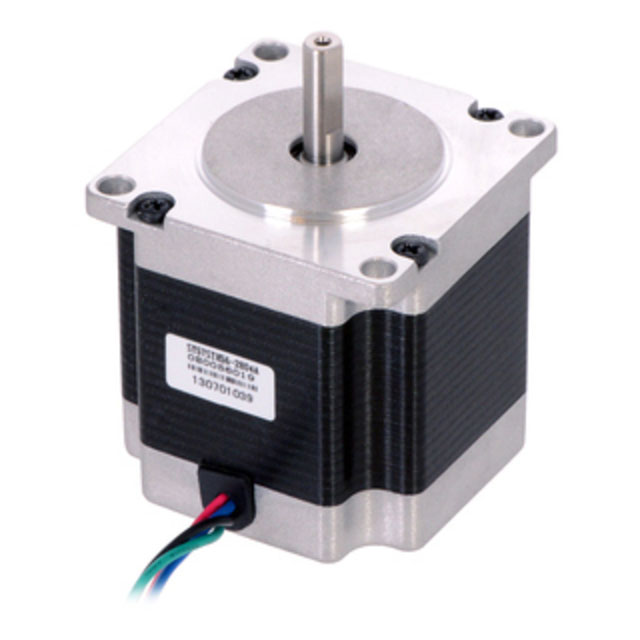
Los motores paso a paso son actuadores de movimiento alimentados por corriente continua (CC) que se desplazan en pasos discretos. Varios conjuntos de bobinas organizados en grupos llamados "fases" determinan la posición del rotor del motor. Energizar cada fase en secuencia provoca la rotación del rotor un paso a la vez. Con el paso controlado por computadora o microcontrolador, se logra un posicionamiento y/o control de velocidad precisos. Los motores paso a paso se seleccionan según el par (torque), los pasos por revolución, el ángulo de paso, el tamaño de bastidor NEMA, la resistencia de las bobinas, la polaridad y las características del eje.