

ステッピングモータ35 製品
並び替え:
| 画像 | 型番 | メーカー | 説明 | 在庫 | 操作 | |
|---|---|---|---|---|---|---|
 | 42M100B2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 35L048B1U | Portescap | STEPPER MOTOR PM UNIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 26M024B2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 23H018D10B | Portescap | STEP MOTOR HYBRID BIPOLAR 5.7V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 42M048C1U | Portescap | STEPPER MOTOR PM UNIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 26M048B2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 44M100D1B | Portescap | STEPPER MOTOR PM BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 26M048B1B | Portescap | STEPPER MOTOR PM BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 42L048D1U | Portescap | STEPPER MOTOR PM UNIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 44M100D2B | Portescap | STEPPER MOTOR PM BIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 23H118D10B | Portescap | STEP MOTOR HYBRID BIPOLAR 6.84V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 35L048B1B | Portescap | STEPPER MOTOR PM BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 55M048D1B | Portescap | STEPPER MOTOR PM BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 55M048D1U | Portescap | STEPPER MOTOR PM UNIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 35L048B2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 55M048D2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 26M048B2U-V31 | Portescap | STEPPER MOTOR PM GEARED UNI 12V | 在庫あり | 最小注文: 500 ホバーで見積 | |
 PDF | 35M048B2U | Portescap | STEPPER MOTOR PM UNIPOLAR 12V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 42M048C1B-Z36 | Portescap | STEP MOTOR PM GEARED BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 | |
 PDF | 42M048C1B | Portescap | STEPPER MOTOR PM BIPOLAR 5V | 在庫あり | 最小注文: 1 ホバーで見積 |
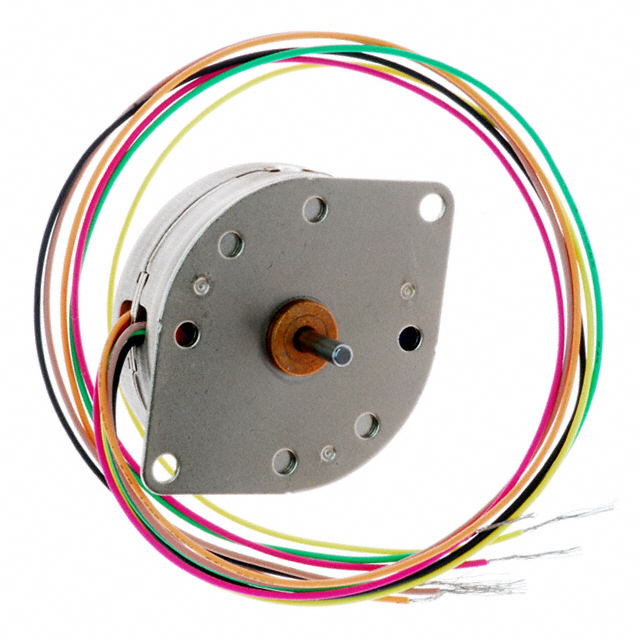
ステッピングモータは直流電圧の動作アクチュエータで、離散的なステップで動作します。複数のコイルセットが「フェーズ」と呼ばれるグループに編成され、モータの回転子位置を決定します。各フェーズを順次励磁することで、回転子が1ステップずつ回転します。コンピュータやマイコンでステッピングを管理することで、正確な位置決めや速度制御が可能になります。ステッピングモータはトルク、1回転あたりのステップ数、ステップ角、NEMAフレームサイズ、コイル抵抗、極性、シャフトの仕様によって選定されます。