Selecting the Best Automotive Protocol CAN Bus or LIN Bus
You often face the choice between CAN Bus and LIN Bus protocol when designing automotive systems. CAN Bus dominates scenario

You often face the choice between CAN Bus and LIN Bus protocol when designing automotive systems. CAN Bus dominates scenarios that demand high speed and reliability, especially in electric vehicles and complex electronic components. LIN Bus suits simpler, cost-sensitive automotive functions where speed is less critical.
The main decision factors include:
- Speed and data rate
- Complexity
- Reliability
- Cost
You can use the can bus vs lin bus comparison and decision guide to match protocol features to your automotive needs.
Key Takeaways
- Choose CAN Bus for high-speed, reliable communication in complex automotive systems. It excels in safety-critical applications like engine control and advanced driver assistance.
- Opt for LIN Bus when working on cost-sensitive projects that require simple communication. It is ideal for basic functions like controlling windows and lights.
- Consider the number of devices and the required speed when selecting a protocol. CAN supports many ECUs, while LIN is suitable for fewer, less demanding tasks.
- Remember that both CAN and LIN can work together in a vehicle. Use CAN for critical tasks and LIN for simpler, low-cost connections.
- Evaluate your system's needs carefully. Matching the right protocol to your automotive components ensures efficient and safe operation.
CAN Bus vs LIN Bus

Comparison Table
When you compare can bus vs lin bus, you see clear differences in how each protocol supports automotive electronic components and integrated circuits. The table below gives you a quick overview of their main features. This helps you decide which protocol fits your needs for communication between devices in your vehicle.
| Feature | CAN Bus | LIN Bus |
|---|---|---|
| Speed | High data rates for performance-sensitive applications | Lower speed suitable for basic tasks |
| Cost | More expensive due to complexity | Cost-effective with single-wire design |
| Complexity | More complex with multi-master design | Simpler with single master |
| Reliability | High reliability with advanced error management | Basic error detection only |
| Typical Applications | Large networks with many ECUs, safety-critical systems | Small, cost-sensitive systems like interior features |
You use can bus when your automotive system needs fast and reliable communication between many electronic control units (ECUs). This is important for integrated circuits that handle safety features or engine management. The can bus supports high-speed data transfer, which is essential for real-time communication in advanced driver assistance systems (ADAS) and autonomous driving. You often find can bus in powertrain control, chassis control, and infotainment systems. These systems rely on complex communication protocols to keep all electronic components working together.
On the other hand, lin bus works best for simple, cost-sensitive applications. You use lin bus for tasks like controlling door locks, seat adjustments, and lighting. The single-wire design of lin bus reduces wiring complexity and cost. This makes it ideal for connecting sensors and actuators that do not need high-speed communication. Lin bus often connects to integrated circuits that manage basic functions, such as window controls or interior lighting.
Tip:
When you choose between can bus vs lin bus, think about the number of devices, the speed you need, and how critical the communication is for safety.
Typical Use Cases in Modern Vehicles
You can see how can bus vs lin bus fit into different automotive systems by looking at their most common use cases. The table below shows where each protocol excels.
| Bus Type | Use Case | Description |
|---|---|---|
| LIN | Internal Device Management | Used for managing functionalities like door locks, seat adjustments, and power windows due to its moderate bandwidth efficiency. |
| LIN | Lighting Management | Controls interior and exterior lighting, allowing for modulation of light intensity and selective activation. |
| LIN | Sensors and Diagnostics | Connects sensors for data collection on engine temperature, fuel level, and tire pressure, aiding in on-board diagnostics. |
| LIN | Integration with Other Networks | Works with CAN for tasks like managing window washers, coordinating operations for efficiency. |
| CAN | Powertrain Control | Coordinates engine, transmission, and related elements for optimal performance. |
| CAN | Chassis Control | Integrates systems like traction control, ABS, and airbags for safety. |
| CAN | Infotainment Systems | Manages multimedia devices, navigation, and entertainment within the vehicle. |
| CAN | Diagnostic Tools | Enables real-time diagnosis of vehicle issues and performance. |
| CAN | Telematics | Facilitates vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communication. |
| CAN | Fleet Management | Allows centralized control and monitoring of a fleet of vehicles. |
You notice that can bus supports more complex and safety-critical applications. These often involve multiple integrated circuits and require robust communication protocols. Lin bus, however, handles simpler tasks and helps reduce the cost and weight of wiring in the vehicle.
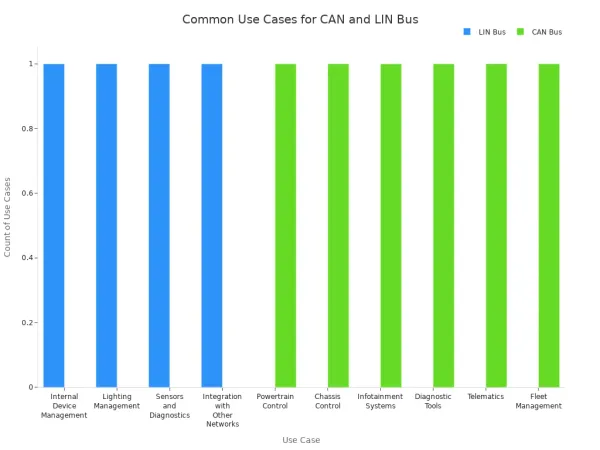
This chart shows that can bus covers a wider range of use cases in automotive systems. You see more applications for can bus in areas that demand high-speed and reliable communication. Lin bus remains popular for basic functions where cost and simplicity matter most.
Recent Advancements and Trends
You should also consider how recent advancements affect your choice between can bus vs lin bus. The rise of ADAS and autonomous vehicles increases the need for advanced communication protocols. Can bus now plays a bigger role in connecting electronic components and integrated circuits that support these features. The growth of the Internet of Things (IoT) and cloud computing also drives new uses for can bus, such as telematics and fleet management.
Lin bus continues to offer a cost-effective solution for simple device interactions. Its single-wire design reduces system size and weight, which is important for space-constrained automotive applications. You benefit from faster installation and lower costs when you use lin bus for basic communication needs.
Note:
Both can bus and lin bus often work together in modern vehicles. You might use can bus for high-speed, safety-critical communication and lin bus for simple, low-cost connections between sensors and actuators.
When you compare can bus vs lin bus, always match the protocol to the needs of your electronic components and integrated circuits. This ensures your automotive system runs efficiently and safely.
CAN Bus Overview
CAN Bus Features
You use CAN Bus, also known as controller area network, when you need reliable communication between many ECUs in your automotive system. CAN Bus follows strict ISO standards to make sure your electronic components and integrated circuits work together smoothly. Here is a table showing the main technical features defined by the latest ISO standards:
| ISO Standard | Description |
|---|---|
| ISO 11898-5:2007 | Supports transmission rates up to 1 Mbit/s, includes low-power features for road vehicles. |
| ISO 11898-6:2013 | Adds selective wake-up, letting you activate specific ECUs using configurable CAN frames. |
| ISO 16845-1:2016 | Provides methods to check if your CAN implementation meets standards. |
| ISO 16845-2:2018 | Sets requirements for testing CAN transceiver selective wake-up functions. |
You benefit from features like robustness against electric disturbances and electromagnetic interference. CAN Bus uses advanced error handling, so your ECUs can retransmit faulty messages and keep data safe. Arbitration lets your system prioritize important data, which helps avoid collisions and keeps communication fast.
Tip: CAN Bus supports complex automotive networks, making it ideal for connecting integrated circuits that control safety and performance.
CAN Bus Strengths
CAN Bus gives you strong data integrity and network robustness. You can rely on its error detection, which uses mechanisms like CRC to keep your data accurate. Fault confinement helps your network stay healthy by isolating problematic ECUs. Differential signaling means your controller area network resists electrical noise, so your automotive system works well even in harsh environments.
| Strengths | Description |
|---|---|
| Error Detection Capabilities | Sophisticated mechanisms ensure high data integrity and reliable communications. |
| Fault Confinement | Isolates faulty ECUs to maintain network integrity. |
| Resistance to Interference | Differential signaling protects against electrical noise. |
You see these strengths in action when your vehicle’s electronic components and integrated circuits need to share information quickly and safely.
CAN Bus Applications
You find CAN Bus at the heart of many automotive systems. It connects ECUs and lets your electronic control units exchange data efficiently. CAN Bus is cheaper than Ethernet and more reliable than LIN for complex tasks. You use CAN Bus for powertrain control, chassis control, infotainment, and diagnostics. It also supports telematics and fleet management, helping your vehicle communicate with other vehicles and infrastructure.
- Powertrain control: Coordinates engine and transmission for better performance.
- Chassis control: Integrates traction control, ABS, and airbags for safety.
- Infotainment: Manages multimedia and navigation systems.
- Diagnostics: Enables real-time monitoring and troubleshooting.
- Telematics: Supports vehicle-to-vehicle and vehicle-to-infrastructure communication.
As automotive technology advances, you need to understand how protocols like CAN Bus connect your electronic components and integrated circuits. This knowledge helps you build safer and smarter vehicles.
LIN Bus Overview
LIN Bus Features
You use the lin bus, or local interconnect network, when you need a simple and cost-effective way to connect electronic components in your automotive system. This protocol works well for basic communication between ECUs and integrated circuits that do not require high speed. The lin bus uses a single wire, which reduces wiring complexity and helps you save on installation costs.
Here is a table showing the main features of the local interconnect network, based on the latest specifications:
| Feature | Description |
|---|---|
| Low Cost | Affordable option due to low hardware requirements and ease of use. |
| Low Speed | Operates at 1.2 to 20.0 kbps, suitable for applications with low data needs. |
| Master-Slave Architecture | Communication is initiated by a master node managing data exchange with slaves. |
| Single Wire Communication | Reduces wiring complexity by using a single line for data transmission. |
The protocol’s main features include:
- Single master, up to 16 slaves (no bus arbitration).
- Single-wire communications up to 19.2 kbit/s at 40 meter bus length.
- Guaranteed latency times.
- Variable length of data frame (2, 4, and 8 bytes).
- Configuration flexibility.
- Data checksum and error detection.
LIN Bus Strengths
You benefit from the lin bus because it offers cost-effectiveness and simplicity. The local interconnect network lets you connect ECUs and integrated circuits with minimal hardware. You only need a single wire and a few microcontrollers. This setup reduces the number of components and makes the protocol easy to implement.
- Cost-effectiveness: lin bus lowers wiring complexity and reduces the number of parts.
- Simplicity: You can set up the local interconnect network quickly, which saves development time.
- Flexibility: The protocol supports different data lengths and guaranteed response times.
- Error detection: Built-in checksums help you maintain reliable communication between ECUs.
LIN Bus Applications
You often use the lin bus in automotive systems for tasks that do not need high-speed data transfer. The local interconnect network connects ECUs and integrated circuits in areas like:
- Power door locks
- Power windows
- Power seats
- Power mirrors
- Windshield wipers
- Seat heaters
- Heating and air-conditioning controls
- Interior lights
- Climate controls
- Steering-wheel controls (cruise control, wiper, radio)
- Sunroof
- Trunk
You see the lin bus in these applications because it keeps costs low and wiring simple. The protocol helps you manage basic functions in your vehicle, making it a practical choice for many automotive electronic components.
Key Differences

Speed and Data Rate
You need to consider speed when choosing a protocol for your automotive system. CAN supports high-speed communication between ECUs, which is important for real-time control and safety. CAN can reach up to 1 Mbps in high-speed mode and even 15 Mbps with flexible data rate. This allows your electronic components and integrated circuits to exchange data quickly. LIN, on the other hand, operates at much lower speeds, typically below 20 kbps. This makes LIN suitable for simple tasks where fast data transfer is not needed, such as controlling interior lights or seat adjustments.
| Bus Type | Maximum Data Rate | Typical Data Rate |
|---|---|---|
| CAN (Low Speed) | 125 kbps | N/A |
| CAN (High Speed) | 1 Mbps | N/A |
| CAN (Flexible Data Rate) | 15 Mbps | N/A |
| LIN | N/A | <20 kbps |
Cost and Complexity
Cost and complexity play a big role in protocol selection. CAN requires more complex hardware and software in your ECUs. This increases the cost, but it also brings advanced features for communication and performance. LIN offers a simpler and cheaper solution. You only need a single wire for LIN, which reduces wiring and installation costs. LIN is easy to implement in electronic components and integrated circuits that do not need high performance.
| Feature | CAN Bus | LIN Bus |
|---|---|---|
| Cost | Higher due to complex hardware | Lower due to simpler protocol |
| Complexity | More complex | Simpler, easier to implement |
| Wiring | Requires multiple wires | Requires only one wire |
| Application Suitability | Suitable for high-performance applications | Ideal for low-cost, distributed systems |
LIN simplifies wiring and lowers system size and weight, making it a good choice for space-limited automotive designs.
Reliability and Error Checking
Reliability is critical for automotive ECUs, especially in safety systems. CAN uses advanced error checking, such as CRC, bit monitoring, and frame checks. If an error occurs, CAN can retransmit messages and even isolate faulty nodes. This makes CAN very reliable for electronic components that control brakes or engines. LIN uses basic error detection, like checksums and header parity. It does not support automatic retransmission or advanced fault handling. LIN works well for non-critical communication, but it does not match CAN’s reliability for important automotive functions.
| Feature | CAN Bus | LIN Bus |
|---|---|---|
| Error Detection Methods | Multiple mechanisms (CRC, bit monitoring, frame checks) | Simple checksums, header parity |
| Error Signaling | Automatic error frames, network-wide notification | Limited, affects only master-slave communication |
| Retransmission Handling | Automatic retransmission | No retransmission support |
| Fault Confinement | Can isolate faulty nodes | No advanced fault confinement |
| Overall Reliability | High, suitable for safety-critical systems | Moderate, for non-critical electronics |
Application Fit
You should match the protocol to the needs of your automotive system. CAN fits best in applications that need fast, reliable communication between many ECUs, such as powertrain, chassis, and infotainment. These systems rely on complex integrated circuits and demand high performance. LIN is ideal for simple, cost-sensitive tasks, like controlling windows, mirrors, or interior lights. LIN connects sensors and switches in body electronics, where speed and reliability are less critical.
| Bus Type | Applications |
|---|---|
| CAN | Passenger vehicles, trucks, buses, agricultural equipment, aviation, industrial automation, robotics |
| LIN | Power door locks, power windows, power seats, windshield wipers, climate controls, interior lights, steering-wheel controls |
When you design your automotive network, always consider how each protocol supports the communication needs of your ECUs and integrated circuits.
Decision Guide
When to Choose CAN
You should select CAN when your automotive system demands fast and reliable communication between many electronic components and integrated circuits. CAN supports high-performance networks, making it ideal for safety-critical systems like engine control, braking, and advanced driver assistance. You can maximize performance by using CAN in environments where real-time data exchange is essential.
Consider these criteria when choosing CAN for your design:
| Criteria | Description |
|---|---|
| Protection from EOS | Use a Transient Voltage Suppression (TVS) diode to protect against Electrical Overstress Events (EOS) due to ESD. |
| Reverse Working Maximum Voltage (VRWM) | Ensure the TVS diode can handle voltages up to 24V to protect against jump-start scenarios. |
| Minimum Breakdown Voltage (VBR) | Select a TVS diode with a breakdown voltage that starts conducting at safe levels during transients. |
| Clamping Voltage (VCLAMP) | Choose a TVS diode with a low clamping voltage to protect the CAN bus system during transient events. |
| Signal Integrity | Ensure low line-to-line capacitance in the TVS diode to maintain signal integrity during operation. |
| Compliance Standards | Adhere to IEC61000-4-2 and AEC-Q standards for automotive design. |
You need to check that your transceivers support the required speed and voltage range. Look for robust EMI and ESD protection to keep your communication stable. Low-power modes help you save energy, and reliable operation in extreme temperatures keeps your system safe.
Tip: Use CAN when you need frequent bidirectional messaging between ECUs or when your system includes many integrated circuits. CAN excels in large, complex automotive networks.
Checklist for CAN selection:
- Speed Compatibility: Confirm the transceiver supports your required data rate.
- Voltage Range: Make sure the transceiver handles voltage fluctuations.
- EMI and ESD Protection: Choose transceivers with strong protection features.
- Low-Power Modes: Select devices with standby modes for efficiency.
- Temperature Range: Ensure reliable operation from -40°C to 125°C.
You can rely on CAN for applications where communication failures could affect safety or performance. CAN helps you maintain signal integrity and supports integration with existing architecture, especially when you need to connect multiple electronic components.
When to Choose LIN
You should choose LIN when your automotive project focuses on cost-sensitive applications and simple communication needs. LIN works best for connecting sensors, actuators, and switches that do not require high-speed data transfer. You can use LIN to link electronic components and integrated circuits in body electronics, climate control, and comfort features.
LIN is optimal for these scenarios:
- Body Control Modules: Lighting, temperature control, door locks, and window control.
- Seat Control: Adjusting seat position, heating, and ventilation.
- Mirror Control: Folding/unfolding mirrors, adjusting positions, and heating.
- Sensor Communication: Tire pressure monitoring and rain-sensing wipers.
- Climate control interfaces and comfort features with human-scale timing requirements.
Note: LIN uses a single-wire design, which reduces wiring complexity and installation costs. You can easily integrate LIN into distributed systems where performance needs are moderate.
You should use LIN when your system has fewer ECUs and does not need high-performance communication. LIN supports integration with other protocols, often acting as a sub-network within a CAN architecture. This setup helps you optimize bandwidth and keep costs low.
Advantages of LIN:
- Simple architecture for basic communication.
- Lower cost for electronic components and integrated circuits.
- Easy integration with existing automotive systems.
- Reliable for non-critical functions.
You can improve efficiency and reduce system size by using LIN in areas like interior lighting, seat adjustments, and mirror controls.
Common Mistakes
You need to avoid frequent mistakes when selecting between CAN and LIN for your automotive communication network. Choosing the wrong protocol can lead to problems with performance, security, and reliability.
Common mistakes include:
- Overlooking performance needs: You might select LIN for a system that requires high-speed communication, which can limit performance and cause delays.
- Ignoring budget constraints: You may choose CAN for simple, cost-sensitive applications, increasing costs without added benefits.
- Misjudging communication type: You could use LIN for systems needing frequent bidirectional messaging, which can reduce efficiency.
- Underestimating system complexity: You might use LIN for large systems with many ECUs, leading to integration issues.
- Failing to consider integration with existing architecture: You may not use LIN as a sub-network within a CAN setup, missing opportunities to optimize bandwidth.
If you choose the wrong protocol, you risk:
- Lack of encryption, which can allow data interception and manipulation.
- Lack of authentication, which can let unauthorized users access your network.
- Lack of access control, which can expose critical systems to attackers.
- Lack of integrity checking, which can enable malicious data injection.
- Lack of redundancy, which can result in unsafe vehicle operation during communication failures.
⚠️ Always match your protocol choice to the needs of your electronic components and integrated circuits. This helps you build a reliable, secure, and efficient automotive system.
You should match the protocol to your automotive system’s needs. CAN Bus works best for critical control systems and advanced automotive functions, especially when you connect many electronic components and integrated circuits. LIN Bus suits low-cost, non-critical automotive applications with simple integrated circuits. The table below helps you choose the right protocol:
| Application Type | Recommended Bus System |
|---|---|
| Critical Control Systems | CAN, FlexRay |
| Low-Cost and Non-critical Systems | LIN |
| High-Bandwidth and Advanced Systems | Automotive Ethernet |
| Multimedia and Infotainment | MOST |
| Hybrid Solution | Combination of LIN and CAN |
CAN Bus is becoming more important as automotive technology grows more complex and integrates IoT features. LIN Bus remains a smart choice for basic automotive functions. You can review your system’s requirements or consult experts to make the best decision for your electronic components and integrated circuits.
FAQ
What makes CAN Bus suitable for complex automotive systems?
CAN Bus lets you connect many electronic components and integrated circuits. You get fast, reliable communication, which helps manage safety-critical functions in automotive networks. This protocol supports real-time data exchange between ECUs for advanced vehicle control.
Why do you use LIN Bus in basic automotive functions?
You use LIN Bus for simple tasks in automotive systems. It connects sensors and actuators, like window controls or seat adjustments. LIN Bus uses a single wire, which reduces cost and wiring complexity for electronic components and integrated circuits.
Can you combine CAN Bus and LIN Bus in one automotive network?
You can combine both protocols in automotive designs. CAN Bus handles high-speed, critical communication between integrated circuits. LIN Bus manages low-speed, non-critical tasks for electronic components. This mix helps optimize performance and cost in your vehicle.
How does protocol choice affect electronic component reliability?
Your choice impacts reliability. CAN Bus offers advanced error checking, which protects electronic components and integrated circuits in automotive safety systems. LIN Bus provides basic error detection, which works for non-critical functions but may not suit vital controls.
Do CAN Bus and LIN Bus support future automotive technologies?
Both protocols support future automotive needs. CAN Bus adapts to new integrated circuits for advanced driver assistance. LIN Bus continues to serve simple electronic components, helping you manage comfort and convenience features as technology evolves.