自動車システムを設計するとき、CANバスとLINバスプロトコルのどちらかを選択することがよくあります。CANバスは、特に高速と信頼性を要求するシナリオを支配します電気自動車そして複雑な電子部品。LIN Busは、速度がそれほど重要ではない、よりシンプルでコストに敏感な自動車機能に適しています。
主な決定要因は次のとおりです。
- 速度とデータレート
- 複雑さ
- 信頼性
- コスト
缶バスとリンバスの比較および決定ガイドを使用して、プロトコル機能を自動車のニーズに合わせることができます。
重要なポイント
- CANバスを選択してください高速で信頼性の高いコミュニケーション複雑な自動車システムで。エンジン制御や高度なドライバー支援などの安全性に不可欠なアプリケーションに優れています。
- 働くときLINバスを選ぶコストに敏感なプロジェクトそれは簡単なコミュニケーションを必要とします。それは窓およびライトを制御するような基本機能にとって理想的です。
- プロトコルを選択するときにデバイスの数と必要な速度を考慮してください。CANは多くのECUをサポートしますが、LINは要求の少ないタスクに適しています。
- CANとLINの両方が車両で一緒に機能することを忘れないでください。重要なタスクにはCANを使用し、よりシンプルで低コストの接続にはLINを使用します。
- システムのニーズを慎重に評価します。適切なプロトコルを自動車部品に合わせると、効率的で安全な操作が保証されます。
CANバスvs LINバス

比較テーブル
缶バスとリンバスを比較すると、各プロトコルのサポート方法に明らかな違いがあります自動車用電子部品と集積回路を使用します。以下の表は、主な機能の概要を示していますを使用します。これは、車両内のデバイス間の通信のニーズに合ったプロトコルを決定するのに役立ちます。
| 特徴 | CANバス | LINバス |
|---|---|---|
| スピード | パフォーマンスに敏感なアプリケーションのための高いデータレート | 基本的なタスクに適した低速 |
| コスト | 複雑さのためにより高価 | 単线デザインでコスト効果が高い |
| 複雑さ | マルチマスターデザインでより複雑 | シングルマスターでシンプル |
| 信頼性 | 高度なエラー管理による高い信頼性 | 基本的なエラー検出のみ |
| 典型的なアプリケーション | 多くのECUを備えた大規模ネットワーク、安全性に不可欠なシステム | インテリア機能のような小型でコストに敏感なシステム |
あなたの自動車システムが多くの電子制御ユニット (ECU) 間の高速で信頼性の高い通信を必要とするとき、あなたはバスを使うことができます。これは、安全機能やエンジン管理を扱う集積回路にとって重要です。缶バスは、高度な運転支援システム (ADAS) や自動運転でのリアルタイム通信に不可欠な高速データ転送をサポートしています。あなたはしばしばパワートレイン制御、シャーシ制御、およびインフォテインメントシステムでバスを見つけることができます。これらのシステムは、複雑な通信プロトコルに依存して、すべての電子コンポーネントを連携させます。
一方、lin busは、シンプルでコストに敏感なアプリケーションに最適です。ドアロックの制御、シート調整、照明などのタスクには、リンバスを使用します。リンバスの単線設計により、配線の複雑さとコストが削減されます。これはそれを接続のために理想的にしますセンサーそして高速通信を必要としないアクチュエーター。リンバスは、ウィンドウコントロールや室内照明などの基本機能を管理する集積回路に接続することがよくあります。
ヒント:
缶バス対リンバスのどちらかを選択するときは、デバイスの数、必要な速度、および通信が安全のためにどれほど重要であるかを考えてください。
現代の車の典型的なユースケース
最も一般的なユースケースを見ると、バスvsリンバスがさまざまな自動車システムにどのように適合するかを確認できます。以下の表は、各プロトコルが優れている場所を示しています。
| バスタイプ | ユースケース | 説明 |
|---|---|---|
| LIN | 内部デバイス管理 | 帯域幅効率が適度であるため、ドアロック、シート調整、パワーウィンドウなどの機能の管理に使用されます。 |
| LIN | 照明管理 | 内外の照明を制御し、光強度の変調と選択的な活性化を可能にします。 |
| LIN | センサーと診断 | エンジン温度、燃料レベル、タイヤ空気圧に関するデータ収集用のセンサーを接続し、オンボード診断を支援します。 |
| LIN | 他のネットワークとの統合 | CANと連携して、ウィンドウウォッシャーの管理、効率化のための操作の調整などのタスクを実行します。 |
| CAN | パワートレイン制御 | 最適なパフォーマンスのために、エンジン、トランスミッション、および関連要素を調整します。 |
| CAN | シャーシ制御 | 安全のため、トラクションコントロール、ABS、エアバッグなどのシステムを統合します。 |
| CAN | インフォテインメントシステム | 車両内のマルチメディアデバイス、ナビゲーション、およびエンターテイメントを管理します。 |
| CAN | 診断ツール | 車両の問題と性能をリアルタイムで診断できます。 |
| CAN | テレマティクス | 車両間インフラストラクチャ (V2I) と車両間 (V2V) の通信を容易にします。 |
| CAN | フリート管理 | 車両群の集中制御と監視を可能にします。 |
バスがより複雑で安全に重要なアプリケーションをサポートできることに気付きます。これらはしばしば複数の集積回路を含み、堅牢な通信プロトコルを必要とします。ただし、リンバスはよりシンプルなタスクを処理し、車両の配線のコストと重量を削減するのに役立ちます。
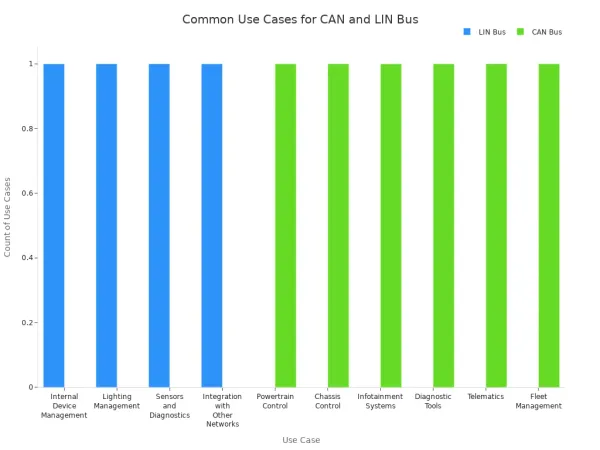
このグラフは、バスが幅広いユースケースをカバーできることを示しています自動車システムで。高速で信頼性の高い通信が必要な地域では、缶バスのアプリケーションが増えています。リンバスは、コストとシンプルさが最も重要な基本機能で人気があります。
最近の進歩とトレンド
また、最近の進歩が缶バスとリンバスの選択にどのように影響するかを検討する必要があります。ADASと自動運転車の台頭により、高度な必要性が高まります通信プロトコルを使用します。Can busは、これらの機能をサポートする電子部品と集積回路の接続において、より大きな役割を果たします。モノのインターネット (IoT) とクラウドコンピューティングの成長は、テレマティクスやフリート管理などの缶バスの新しい用途も推進しています。
Linバスは、簡単なデバイスの相互作用のための費用効果の高いソリューションを提供し続けていますを使用します。その単線設計は、システムのサイズと重量を削減します。これは、スペースに制約のある自動車アプリケーションにとって重要です。基本的な通信ニーズにlinバスを使用すると、より高速なインストールと低コストの恩恵を受けます。
注:
バスとリンバスの両方が、現代の車両で一緒に機能することがよくあります。高速で安全性に不可欠な通信には缶バスを使用し、センサーとアクチュエーター間のシンプルで低コストの接続にはリンバスを使用できます。
缶バスとリンバスを比較するときは、常にプロトコルを電子部品と集積回路のニーズに合わせてください。これにより、自動車システムが効率的かつ安全に稼働します。
CANバスの概要
CANバスの特徴
自動車システムの多くのECU間で信頼性の高い通信が必要な場合は、コントローラーエリアネットワークとも呼ばれるCANバスを使用します。CANバスは厳密に続くISO標準電子部品と集積回路がスムーズに連携するようにします。最新のISO規格で定義されている主な技術的特徴を示す表を次に示します。
| ISOスタンダード | 説明 |
|---|---|
| ISO 11898-5:2007 | 最大1 Mbit/sの伝送速度をサポートし、道路車両用の低電力機能を備えています。 |
| ISO 11898-6:2013 | 選択的なウェイクアップを追加し、構成可能なCANフレームを使用して特定のECUをアクティブ化できます。 |
| ISO 16845-1:2016 | CAN実装が標準を満たしているかどうかを確認する方法を提供します。 |
| ISO 16845-2:2018 | CANトランシーバーの選択的なウェイクアップ機能をテストするための要件を設定します。 |
電気的擾乱や電磁干渉に対する堅牢性などの機能の恩恵を受けます。CAN Busは高度なエラー処理を使用しているため、ECUは障害のあるメッセージを再送信し、データを安全に保つことができます。仲裁により、システムは重要なデータに優先順位を付けることができます。これにより、衝突を回避し、通信を迅速に維持できます。
ヒント: CAN Busは複雑な自動車ネットワークをサポートしているため、安全性と性能を制御する集積回路の接続に最適です。
CANバスの強み
CANバスはあなたに与えます強力なデータ整合性とネットワークの堅牢性。CRCなどのメカニズムを使用してデータを正確に保つエラー検出に頼ることができます。障害のある閉じ込めは、問題のあるECUを分離することで、ネットワークの健全性を維持するのに役立ちます。差動信号は、コントローラーエリアネットワークが電気ノイズに抵抗することを意味します。そのため、自動車システムは過酷な環境でもうまく機能します。
| 強み | 説明 |
|---|---|
| エラー検出機能 | 洗練されたメカニズムにより、高いデータ整合性と信頼性の高い通信が保証されます。 |
| 障害の閉じ込め | ネットワークの整合性を維持するため、欠陥のあるECUを分離します。 |
| 干渉への抵抗 | 差動信号は電気ノイズから保護します。 |
車両の電子部品と集積回路が情報を迅速かつ安全に共有する必要がある場合、これらの強みが実際に機能していることがわかります。
CANバスアプリケーション
あなたは多くの自動車システムの中心にあるCANバスを見つけます。ECUを接続し、電子制御ユニットが効率的にデータを交換できるようにします。CANバスはイーサネットより安いそして複雑なタスクのためのLINより信頼できる。パワートレイン制御、シャーシ制御、インフォテインメント、診断にはCAN Busを使用します。また、テレマティクスとフリート管理をサポートし、車両が他の車両やインフラストラクチャと通信できるようにします。
- パワートレイン制御: より良いパフォーマンスのためにエンジンとトランスミッションを調整します。
- シャーシ制御: 安全のためにトラクションコントロール、ABS、エアバッグを統合します。
- Infotainment: マルチメディアおよびナビゲーションシステムを管理します。
- 診断: リアルタイムのモニタリングとトラブルシューティングを可能にします。
- テレマティクス: 車両間および車両間インフラストラクチャ通信をサポートします。
自動車技術が進歩するにつれて、CAN Busのようなプロトコルがどのように接続するかを理解する必要があります电子部品および集积回路を使用します。この知識は、より安全でスマートな車両を構築するのに役立ちます。
LINバスの概要
LINバスの特徴
あなたはリンバス、またはローカル相互接続ネットワーク、自動車システムの電子部品を接続するためのシンプルで費用効果の高い方法が必要な場合。このプロトコルは、ECUと高速を必要としない集積回路との間の基本的な通信に適しています。リンバスは1本のワイヤーを使用しているため、配線の複雑さを軽減し、設置コストを節約できます。
最新の仕様に基づいて、ローカル相互接続ネットワークの主な機能を示す表を次に示します。
| 特徴 | 説明 |
|---|---|
| 低コスト | 低ハードウェア要件と使いやすさのために手ごろな価格のオプション。 |
| ロースピード | 1.2〜20.0 kbpsで動作し、データのニーズが低いアプリケーションに適しています。 |
| Master-Slaveアーキテクチャ | 通信は、スレーブとのデータ交換を管理するマスターノードによって開始される。 |
| シングルワイヤ通信 | データ伝送に1本の線を使用することで、配線の複雑さを軽減します。 |
プロトコルの主な機能は次のとおりです。
- シングルマスター、最大16スレーブ (バス仲裁なし)。
- 40メートルのバスの長さで19.2 kbit/sまでの単線通信。
- 保証された待ち時間。
- データフレームの可変长 (2、4、および8バイト)。
- 設定の柔軟性。
- データチェックサムとエラー検出。
LINバスの強み
それが提供するので、あなたはリンバスの恩恵を受ける費用対効果とシンプルさを使用します。ローカル相互接続ネットワークを使用すると、最小限のハードウェアでECUと集積回路を接続できます。あなたは単一のワイヤーといくつかを必要としますマイクロコントローラーを使用します。このセットアップにより、コンポーネントの数が減り、プロトコルの実装が容易になります。
- 費用対効果: linバスは配線の複雑さを減らし、部品の数を減らします。
- シンプルさ: ローカル相互接続ネットワークをすばやくセットアップできるため、開発時間を節約できます。
- 柔軟性: プロトコルはさまざまなデータ長と保証された応答時間をサポートします。
- エラー検出: 組み込みのチェックサムは、ECU間の信頼性の高い通信を維持するのに役立ちます。
LINバスアプリケーション
高速データ転送を必要としないタスクのために、自動車システムでリンバスをよく使用します。ローカル相互接続ネットワークは、次のような領域でECUと集積回路を接続します。
- 力のドアロック
- パワーウィンドウ
- パワーシート
- パワーミラー
- ワイパー
- シートヒーター
- 暖房とエアコンのコントロール
- インテリアライト
- 気候制御
- ハンドルコントロール (クルーズコントロール、ワイパー、ラジオ)
- サンルーフ
- トランク
これらのアプリケーションでは、コストを低く抑え、配線を簡単にするため、linバスが表示されます。このプロトコルは、車両の基本機能を管理するのに役立ち、多くの自動車用電子部品の実用的な選択になります。
主な違い

速度とデータレート
自動車システムのプロトコルを選択するときは、速度を考慮する必要があります。CANは、リアルタイム制御と安全性にとって重要な、ECU間の高速通信をサポートしています。CANは高速モードで最大1 Mbpsに達することができますフレキシブルなデータレートでも15 Mbps。これにより、電子部品と集積回路がデータをすばやく交換できます。一方、LINは、はるかに低い速度、典型的には20 kbps未満で動作する。これにより、LINは、室内照明の制御や座席の調整など、高速データ転送が不要な単純なタスクに適しています。
| バスタイプ | 最大データレート | 典型的なデータレート |
|---|---|---|
| CAN (低速) | 125 kbps | N/A |
| CAN (高速) | 1 Mbps | N/A |
| CAN (フレキシブルデータレート) | 15 Mbps | N/A |
| LIN | N/A | <20 kbps |
コストと複雑さ
コストと複雑さは、プロトコルの選択に大きな役割を果たします。CANには、より複雑なハードウェアとソフトウェアが必要です。これはコストを増加させますが、コミュニケーションとパフォーマンスのための高度な機能ももたらします。LINは、よりシンプルで安価なソリューションを提供します。LINには1本のワイヤしか必要としないため、配線と設置のコストが削減されます。LINは、高性能を必要としない電子部品や集積回路に実装するのが簡単です。
| 特徴 | CANバス | LINバス |
|---|---|---|
| コスト | 複雑なハードウェアのために高い | よりシンプルなプロトコルのために低く |
| 複雑さ | もっと複雑 | シンプルで実装が簡単 |
| 配線 | 複数のワイヤが必要 | 1本のワイヤのみが必要です |
| アプリケーションの適合性 | 高性能アプリケーションに适した | 低コスト、分散システムのための理想 |
LINは配線を簡素化し、システムのサイズと重量を下げます、スペースが限られた自動車デザインに適しています。
信頼性とエラーチェック
信頼性は、自動車のECU、特に安全システムにとって重要です。CANは、CRC、ビットモニタリング、フレームチェックなどの高度なエラーチェックを使用します。エラーが発生した場合、CANはメッセージを再送信し、障害のあるノードを分離することもできます。これにより、CANはブレーキやエンジンを制御する電子部品に対して非常に信頼性が高くなります。LINは、チェックサムやヘッダーパリティなどの基本的なエラー検出を使用します。自動再送信または高度な障害処理はサポートしていません。LINは重要でない通信には適していますが、重要な自動車機能に対するCANの信頼性とは一致しません。
| 特徴 | CANバス | LINバス |
|---|---|---|
| エラー検出方法 | 複数のメカニズム (CRC、ビットモニタリング、フレームチェック) | シンプルなチェックサム、ヘッダーパリティ |
| エラー信号 | 自動エラーフレーム、ネットワーク全体の通知 | 制限され、マスタースレーブ通信のみに影響します |
| 再送信処理 | 自動再送信 | 再送サポートなし |
| 障害の閉じ込め | 障害のあるノードを分離できます | 高度な障害の閉じ込めなし |
| 全体的な信頼性 | 高い、安全クリティカルなシステムに適しています | 中程度、重要でない電子機器用 |
アプリケーションフィット
プロトコルを自動車システムのニーズに合わせる必要があります。CANは、パワートレイン、シャーシ、インフォテインメントなど、多くのECU間で高速で信頼性の高い通信を必要とするアプリケーションに最適です。これらのシステムは複雑な集積回路に依存し、高性能を要求する。LINは、シンプルでコストに敏感なタスクに最適です、窓、鏡、または室内灯の制御のような。LINは、速度と信頼性がそれほど重要ではないボディエレクトロニクスのセンサーとスイッチを接続します。
| バスタイプ | アプリケーション |
|---|---|
| CAN | 乗用車、トラック、バス、農業機器、航空、産業オートメーション、ロボット工学 |
| LIN | パワードアロック、パワーウィンドウ、パワーシート,ワイパー,気候制御,インテリアライト,ハンドルコントロール |
自動車ネットワークを設計するときは、各プロトコルがECUと集積回路の通信ニーズをどのようにサポートするかを常に考慮してください。
決定ガイド
CANを選択するとき
自動車システムが多くの電子部品と集積回路の間の高速で信頼性の高い通信を要求する場合は、CANを選択する必要があります。CANは高性能ネットワークをサポートしているため、エンジン制御、ブレーキ、高度なドライバー支援などの安全に不可欠なシステムに最適です。リアルタイムのデータ交換が不可欠な環境でCANを使用することで、パフォーマンスを最大化できます。
デザインにCANを選択するときは、これらの基準を考慮してください。
| 基準 | 説明 |
|---|---|
| EOSからの保護 | 一時的な電圧抑制 (TVS) ダイオードを使用して、ESDによる電気的過剰ストレスイベント (EOS) から保護します。 |
| 逆働く最大電圧 (VRWM) | TVSダイオードが最大24Vの電圧を処理できることを確認して、ジャンプスタートのシナリオから保護します。 |
| 最小故障電圧 (VBR) | トランジェント中に安全なレベルで伝導を開始するブレークダウン電圧のTVSダイオードを選択します。 |
| クランプ電圧 (VCLAMP) | トランジェントイベント中にCANバスシステムを保護するために、クランプ電圧の低いTVSダイオードを選択してください。 |
| 信号の完全性 | 動作中の信号の整合性を維持するために、TVSダイオードのライン間容量を低くしてください。 |
| コンプライアンス基準 | 自動車設計のIEC61000-4-2およびAEC-Q基準に準拠します。 |
トランシーバーが必要な速度と電圧範囲をサポートしていることを確認する必要があります。堅牢なEMIおよびESD保護を探して、通信を安定させます。低電力モードはエネルギーを節約するのに役立ち、極端な温度での信頼できる操作はシステムを安全に保ちます。
ヒント: ECU間で頻繁に双方向メッセージングが必要な場合、またはシステムに多くの集積回路が含まれている場合は、CANを使用します。大規模で複雑な自動車ネットワークに優れています。
CAN選択のチェックリスト:
- スピードの互換性: トランシーバーが必要なデータレートをサポートしていることを確認します。
- 電圧範囲: トランシーバーが電圧変動を処理することを確認します。
- EMIおよびESD保護: 強力な保護機能を備えたトランシーバーを選択してください。
- 低電力モード: スタンバイモードのデバイスを選択して効率化します。
- 温度範囲:-40 °Cから125 °Cまでの信頼できる操作を確保します。
通信障害が安全性やパフォーマンスに影響を与える可能性のあるアプリケーションは、CANに依存できます。CANは、特に複数の電子コンポーネントを接続する必要がある場合に、信号の整合性を維持し、既存のアーキテクチャとの統合をサポートします。
いつLINを選ぶか
自動車プロジェクトがコストに敏感なアプリケーションと簡単なコミュニケーションニーズに焦点を当てている場合は、LINを選択する必要があります。LINは、高速データ転送を必要としないセンサー、アクチュエータ、およびスイッチの接続に最適です。LINを使用して、ボディエレクトロニクス、気候制御、および快適機能の電子部品と集積回路をリンクできます。
LINはこれらのシナリオに最適です。
- ボディ制御モジュール: 照明、温度制御、ドアロック、および窓制御。
- シートコントロール: シートの位置、暖房、換気の調整。
- ミラー制御: ミラーの折り畳み/展開、位置の調整、および加熱。
- センサー通信: タイヤ空気圧モニタリングと雨感知ワイパー。
- 人間規模のタイミング要件を備えた気候制御インターフェースと快適機能。
注: LINは単線設計を使用しているため、配線の複雑さと設置コストが削減されます。LINは、パフォーマンスのニーズが中程度の分散システムに簡単に統合できます。
システムのECUが少なく、高性能通信が必要ない場合は、LINを使用する必要があります。LINは他のプロトコルとの統合をサポートし、CANアーキテクチャ内のサブネットワークとして機能することがよくあります。この設定により、帯域幅を最適化し、コストを低く抑えることができます。
LINの利点:
- 基本的なコミュニケーションのためのシンプルなアーキテクチャ。
- 電子部品および集積回路の低コスト。
- 既存の自動車システムとの容易な統合。
- 非重要な機能に対して信頼性があります。
室内照明、座席調整、ミラーコントロールなどの分野でLINを使用することで、効率を向上させ、システムサイズを縮小できます。
よくある間違い
自動車通信ネットワークのCANとLINを選択する際に、頻繁な間違いを避ける必要があります。間違ったプロトコルを選択すると、パフォーマンス、セキュリティ、信頼性に問題が生じる可能性があります。
よくある間違いは次のとおりです。
- パフォーマンスニーズの概要: 高速通信を必要とするシステムにLINを選択すると、パフォーマンスが制限され、遅延が発生する可能性があります。
- 予算の制約を無視する: シンプルでコストに敏感なアプリケーションにCANを選択し、追加のメリットなしにコストを増加させることができます。
- 通信タイプの誤った判断: 頻繁な双方向メッセージングを必要とするシステムにLINを使用すると、効率が低下する可能性があります。
- システムの複雑さを過小評価する: 多くのECUを備えた大規模システムにLINを使用すると、統合の問題が発生する可能性があります。
- 既存のアーキテクチャとの統合を検討できない場合: CANセットアップ内でLINをサブネットワークとして使用することはできません。帯域幅を最適化する機会がありません。
間違ったプロトコルを選択すると、次のリスクがあります。
- 暗号化の欠如これにより、データの傍受と操作が可能になります。
- 許可されていないユーザーがネットワークにアクセスできるようにする認証の欠如。
- 重要なシステムを攻撃者にさらす可能性のあるアクセス制御の欠如。
- 悪意のあるデータ注入を可能にする整合性チェックの欠如。
- 冗長性がないため、通信障害時の車両の安全でない操作が発生する可能性があります。
⚠️ プロトコルの選択を常に電子部品や集積回路のニーズに合わせてください。これにより、信頼性が高く、安全で効率的な自動車システムを構築できます。
プロトコルを自動車システムのニーズに合わせる必要があります。CANバスは、特に多くを接続する場合、重要な制御システムと高度な自動車機能に最適です电子部品および集积回路を使用します。LIN Busは、シンプルな集積回路を備えた低コストで重要でない自動車アプリケーションに適しています。以下の表は、適切なプロトコルを選択するのに役立ちます:
| アプリケーションタイプ | 推奨バスシステム |
|---|---|
| 重要な制御システム | CAN、FlexRay |
| 低コストで重要でないシステム | LIN |
| 高帯域幅と高度なシステム | 自動車用イーサネット |
| マルチメディアとインフォテインメント | 最も |
| ハイブリッドソリューション | LINとCANの組み合わせ |
自動車技術がより複雑になるにつれて、CANバスはより重要になりつつありますIoT機能を統合します。LINバスは、基本的な自動車機能の賢い選択のままです。システムの要件を確認するか、専門家に相談して、電子部品と集積回路の最良の決定を下すことができます。
よくある質問
CANバスが複雑な自動車システムに適している理由は何ですか?
CANバスは多くの电子部品を接続し、集積回路を使用します。高速で信頼性の高いコミュニケーションが可能になり、自動車ネットワークの安全に不可欠な機能の管理に役立ちます。このプロトコルは、高度な車両制御のためのECU間のリアルタイムデータ交換をサポートします。
基本的な自動車機能でLINバスを使用するのはなぜですか?
LINバスは、自動車システムの簡単なタスクに使用します。ウィンドウコントロールやシート調整など、センサーとアクチュエータを接続します。LINバスは単一のワイヤを使用するため、電子部品や集積回路のコストと配線の複雑さが軽減されます。
CANバスとLINバスを1つの自動車ネットワークに組み合わせることはできますか?
両方のプロトコルを自動車デザインで組み合わせることができます。CANバスは、集積回路間の高速で重要な通信を処理します。LINバスは、電子部品の低速で重要でないタスクを管理します。このミックスは、車両のパフォーマンスとコストを最適化するのに役立ちます。
プロトコルの選択は電子部品の信頼性にどのように影響しますか?
あなたの選択は信頼性に影響を与えます。CAN Busは、自動車の安全システムの電子部品と集積回路を保護する高度なエラーチェックを提供します。LINバスは基本的なエラー検出を提供します。これは重要でない機能では機能しますが、重要な制御には適していない場合があります。
バスとLINバスは将来の自動車技術をサポートできますか?
どちらのプロトコルも将来の自動車のニーズをサポートします。CANバス高度なドライバー支援のための新しい集積回路に適応します。LIN Busは引き続きシンプルな電子部品を提供しており、テクノロジーの進化に伴い快適さと便利さの機能を管理するのに役立ちます。